
You might like















さまざまな大会環境で調整用カメラを安定して運用するために可変ND+CPLフィルタを導入。カメラまわりがゴツくなってきた… (34mm->ステップアップ37mm->フィルタ) カメラ業界は機材が豊富でありがたい。

調整用アプリをtauriからwebアプリ(axum)に移植中。 Claude Code+PlaywrightMCPでテスト、デバッグまでやってくれるので放置で実装できる率が高まって良いね。(これが目的。)
散財目的でヨドバシアキバに行ったけど、何も欲しいものがなかった。悲しい。 計測器ランドとかに行くべきだったかもしれないし、行かなくて良かったのかもしれない…
コーディングってそこそこ楽しかったんだなあという気分もありつつ、コーディングしなくても満足できる程度に作る事自体を楽しめているので、まだ大丈夫そうだ。
戒め。ホスト環境とフリースタンディング環境はCの規格で規定されているようで、これは間違いだった。(ただしよくあるフリースタンディング+newlib+独自systemcall環境はこの投稿2文目の通り)
C言語は仕様がPOSIXライクなシステムに依存しているのに組み込み向けとされているのが本当に納得行っていない。 Cで組み込み開発する時は、仕様から外れたハックをしている自覚を持つべきだと思う。
ClaudeDesktop(MCP Client)+Claude Code(MCP Server)を試しているが、なんかじゃじゃ馬で扱いにくいな。 エージェント感が強いのはわかるが、一瞬で明後日の方向に突っ走っていってしまう。指示の出し方が悪いんだろうか・・・
迷路ライブラリに左手法が存在しているらしい、AIに言われて初めて知った。 (ハルシネーションかと思ったが本人が忘れていただけで本当にあったというオチ)
EKFの観測モデル(濃青)と実測(薄青)がうまく収束してる箇所。(未だうまく行っていない箇所の方が多いが) 全体的にこうなってくれればなあ・・デバッグが難しい。
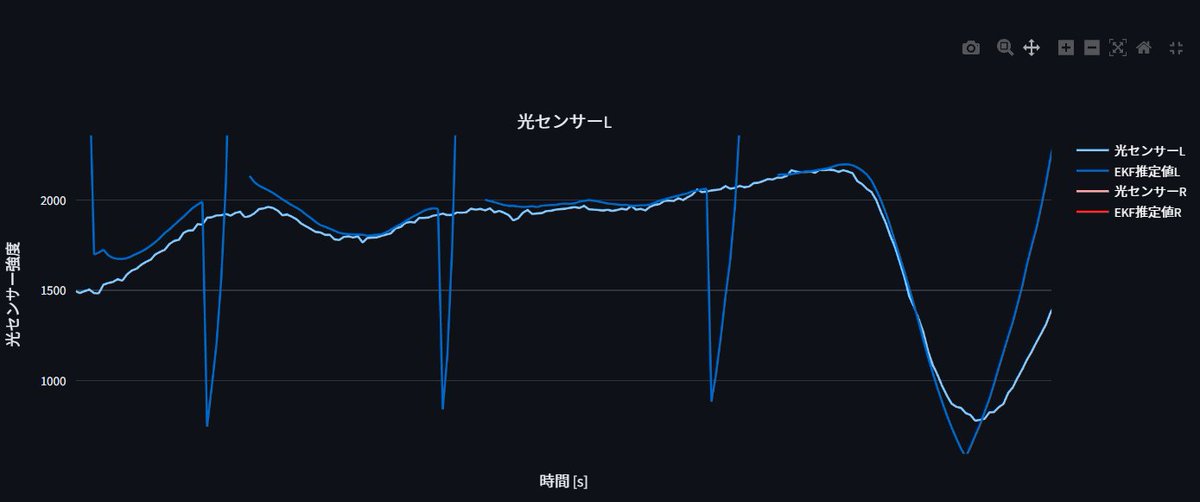
教科書的なKFの更新ステップってすべてのセンサのベクトルを使って一気に計算してるけど、実用上は個々のセンサ(とか、小さいグループ)ごとに逐次適用しても(ちょっと性能は落ちるけど)動く、というのを知った。
ChatGPTでマウスの推定器について壁打ち議論・検証してみたけれど、会話が長く続くと忘れ始めるのがかなり微妙で途中で断念。コンテキスト長による制約なのかな? マウスみたいな特殊ケースだと、既存概念のアナロジーではダメだと理解させる必要があり、それを忘れて堂々巡りし始めるとつらい。
ビューアの機能が充実してきた。 カメラを使ったGroundTruth取得システムで取った軌跡を再生してみると、後から好きな視点で再生可能な動画みたいで面白い。

















































































United States Trends
- 1. #FinallyOverIt 5,911 posts
- 2. Summer Walker 18.5K posts
- 3. #FridayVibes 2,816 posts
- 4. #zzzSpecialProgram 3,202 posts
- 5. #criticalrolespoilers 4,213 posts
- 6. Wale 33.9K posts
- 7. #MakeOffer 13.3K posts
- 8. Domain For Sale 13.7K posts
- 9. 5sos 22.5K posts
- 10. Justin Fields 10.2K posts
- 11. Go Girl 26.2K posts
- 12. 1-800 Heartbreak 1,540 posts
- 13. Drake Maye 21.6K posts
- 14. Judge 208K posts
- 15. Bihar 287K posts
- 16. RIN AOKBAB BEGIN AGAIN 515K posts
- 17. Meek 5,868 posts
- 18. Arrest Bill Clinton 5,189 posts
- 19. GM CT 21.1K posts
- 20. Disc 2 1,015 posts
You might like
-
 あこちゃん(本物)
あこちゃん(本物)
@25Isys -
 たけたけたけ
たけたけたけ
@ta_ke_yu_ta -
 アライさん⋈競技引退
アライさん⋈競技引退
@yuki_ar -
 hidejr1053
hidejr1053
@hidejr1053 -
 S. Hirai
S. Hirai
@Verdi_Hirai -
 F.Nakashima
F.Nakashima
@MmYukikaze -
 しろめ@半田ディザスターの人
しろめ@半田ディザスターの人
@Shirome_crow -
 nano
nano
@popopopooonnano -
 ginoji_nRF52, mini4WDもロボット?? 🐰📒
ginoji_nRF52, mini4WDもロボット?? 🐰📒
@ginoji_5 -
 Rofumi(H.S.)
Rofumi(H.S.)
@mechanic_ga -
 N.Go.
N.Go.
@N_Go_mouse -
 Y
Y
@PAGbeta -
 Arthur
Arthur
@micromouser -
 mako
mako
@ym_ISys -
 マイクロマウス委員会東日本支部
マイクロマウス委員会東日本支部
@MicromouseEast
Something went wrong.
Something went wrong.