
Manuel Yves Galliker
@manumerous
Learning, Robotics, Controls & Open Source Enthusiast
You might like












Introducing MARS, the first Personal AI Robot. In technology, getting to the future we want starts with building it together. This is why we designed Mars. Inspired by early PCs, Mars is a powerful, complete, extendable robot. It runs BASIC, an open embodied AI agent we…
this year alone, I've met hundreds of the world's elite AI researchers + engineers steering the future of intelligence, and they ultimately want to do it here, in the US 🇺🇸 If a visa or green card are holding you back, join us on 7/31 in SF and hear real stories from…
Vibe and atmoshpere are spot on again @radbackwards! 😍

Glad to share the Real-Time Action Chunking Algorithm @kvablack, @svlevine and I developed at @physical_int! By inferring the VLA in a receding horizon manner we enable parallel planning and execution improving speed, performance, and motion smoothness.

We got a robot to clean up homes that were never seen in its training data! Our new model, π-0.5, aims to tackle open-world generalization. We took our robot into homes that were not in the training data and asked it to clean kitchens and bedrooms. More below⤵️
We are excited to share new experiments with AgiBot @AgiBot_zhiyuan on multi-task, multi-embodiment VLAs! With one model that can perform many tasks with both two-finger grippers and multi-fingered hands, we take another step toward one model for all robots and tasks.

It's All in the Hips Can we learn anything from the evolution of hip kinematics in humanoid bots? Is there a growing consensus of the optimal design? Yes. And there is data to prove it. First, a primer on Hip Kinematics 🧵




when you argue with me about control theory this is who you’re arguing with

The latest MuJoCo release now enables Massively Parallel GPU-accelerated physics simulation! Gone be the days of debugging proprietary physics simulators! 😃 playground.mujoco.org


“Pretraining as we know it will end” Robotics: Hold my 🍺 , new data coming Source: Agibot
Wow, with the recent announcements from @OpenAI and @AnthropicAI Zürich starts to look surprisingly similar to Silicon Valley these days. Is someone trying to send me a sign that it's time to pack up my hiking boots and move back home? 🏔️ 🚠🚶🇨🇭 picture by @GreaterZurich

Can generative video models accurately model real world futures and contact physics? At @1x_tech, we're working on world models as a scalable architecture to teach robots to solve tasks and evaluate themselves. We're announcing our World Model Sampling Challenge with $10,000…

The original RL algorithms, inspired by natural learning, were online and incremental—they were streaming in the sense that they learned from each increment of experience as it happened, then discarded it, never to be processed again. The streaming algorithms were simple and…

Would you believe that deep RL can work without replay buffers, target networks, or batch updates? Our recent work gets deep RL agents to learn from a continuous stream of data one sample at a time without storing any sample. Joint work with @Gautham529 and @rupammahmood.

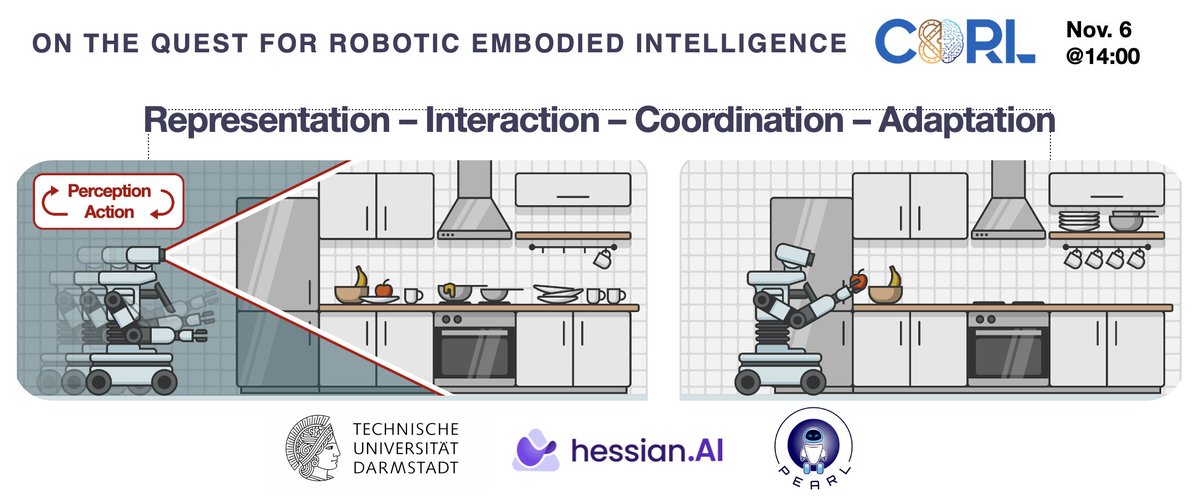
You can now watch my early career keynote at #CoRL2024 on the @corl_conf YouTube channel: youtu.be/n3xvEoq2tXg?t=… Slides are available here: pearl-lab.com/2024/11/20/ear… Hope you find it interesting!🤖
Honored to give an Early Career Keynote at #CoRL2024! My talk, "On the Quest for Robotic Embodied Intelligence," will explore how structure in robot learning enables faster, safer, and adaptive robot behaviors. Excited to share this vision! 🚀 corl.org/program/speake… #robotics
It was such an pleasure to been able to contribute to this unique workshop! It was great to see so amy different perspectives from both industry amd academia come together! Big thanks to the organizers! 😀

A lot of energy at our workshop to close the week at @corl_conf! Thanks to all speakers, panelists, and the huge number of participants for making it so lively and insightful 🤖 And huge thanks to the other organizers @YoungwoonLee @Xingyu2017 @pabbeel




I will be attending @corl_conf in Munich this week! 🤖 🍻 I’d love to connect and chat about all things robotics and learning. If you’re interested in learning more about @1x_tech or just want to dive into some robotics talk, feel free to reach out to me! 😀
Very impressive progress from the guys at PI. Manipulating cloth has for a long time been one of the tasks where robots really struggeled. Not anymore! 😀
At Physical Intelligence (π) our mission is to bring general-purpose AI into the physical world. We're excited to show the first step towards this mission - our first generalist model π₀ 🧠 🤖 Paper, blog, uncut videos: physicalintelligence.company/blog/pi0
















































































United States Trends
- 1. Columbus 178K posts
- 2. President Trump 1.15M posts
- 3. Middle East 281K posts
- 4. Brian Callahan 11.3K posts
- 5. #IndigenousPeoplesDay 13.5K posts
- 6. Azzi 7,827 posts
- 7. Titans 37.6K posts
- 8. Thanksgiving 56K posts
- 9. Vrabel 6,755 posts
- 10. Cape Verde 19.7K posts
- 11. Macron 221K posts
- 12. #UFC323 2,567 posts
- 13. Marc 51K posts
- 14. #Isles 1,653 posts
- 15. HAZBINTOOZ 6,562 posts
- 16. Sabres 3,744 posts
- 17. Seth 51.1K posts
- 18. Native Americans 14.1K posts
- 19. Giannis 9,432 posts
- 20. Apple TV 6,077 posts
You might like










Something went wrong.
Something went wrong.