#webots arama sonuçları

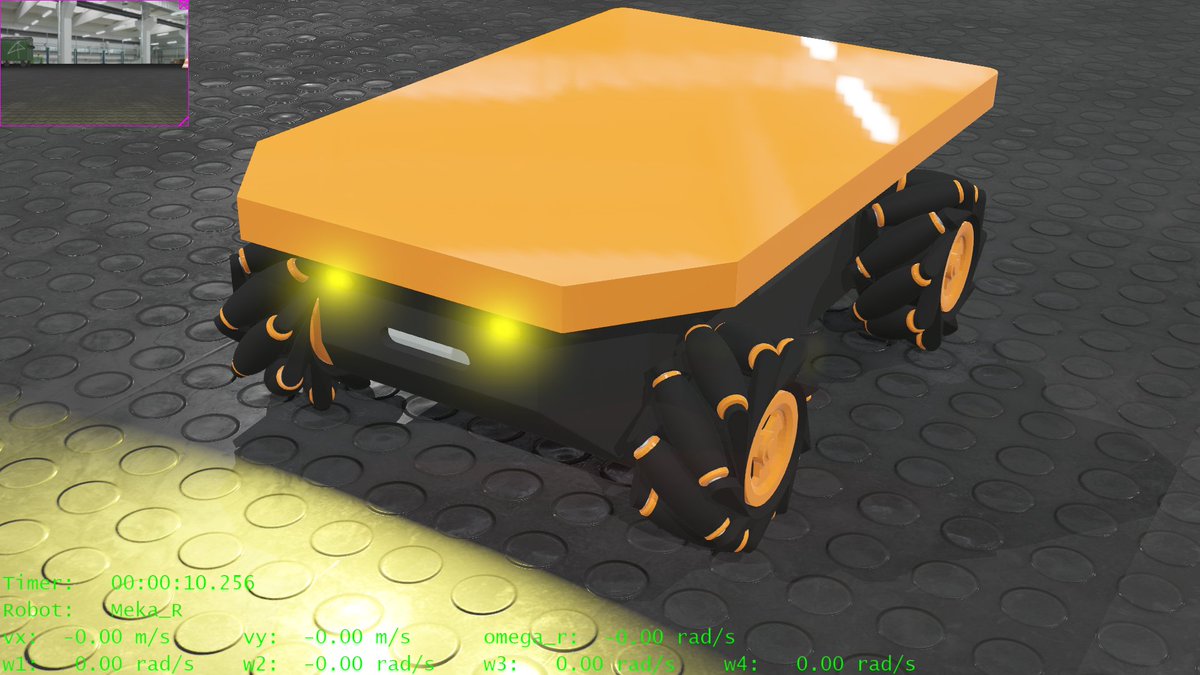
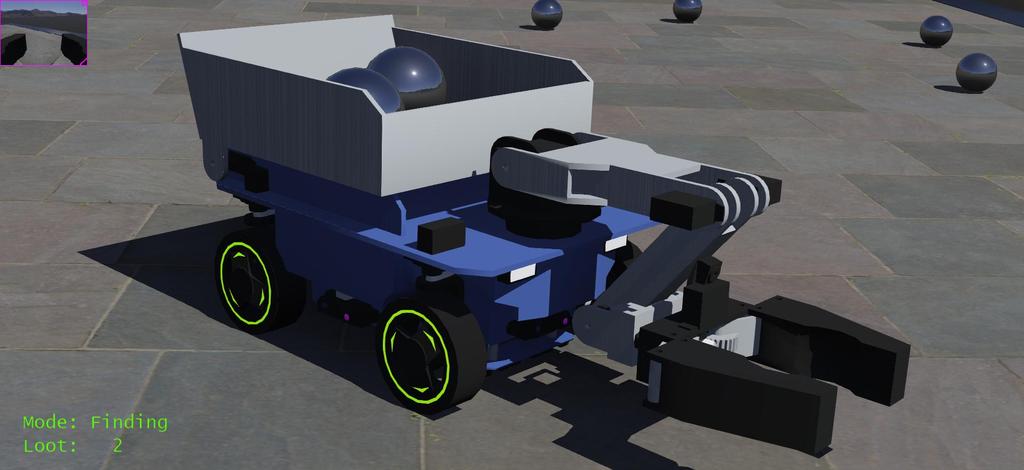
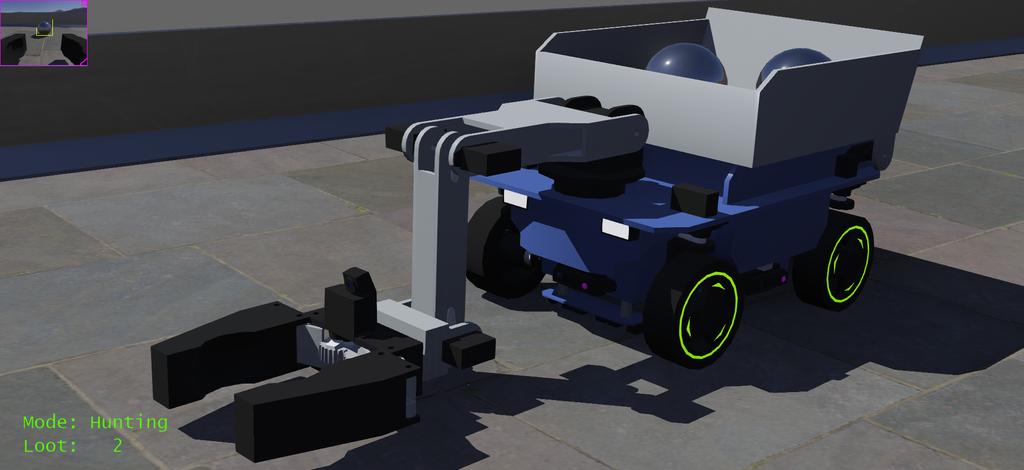
This is a simulation of a Mecanum-wheeled robot in Webots. I use 3D OBJ models from Tinkercad. The controls are in Python, and I use an Xbox controller. 3D model: tinkercad.com/things/4dFTwyw… GitHub Webots world: github.com/DrakerDG/Webot… #robot #tinkercad #webots #mecanum #python


I've implemented an underwater environment demo using #ROS2 and #Webots. Propeller nodeデフォルトであるので、ROV / AUVのシミュレーターも簡単につくれそうです👀 ※機体が後進するのはCADモデルの都合

ACD Special Test Simulator: Webots Robot: Estafette Renault V3 Navigation system: OpenCV Speed: 83 km/h #Webots #Renault #Estafette #OpenCV #Autonomous
Downforce Test (Two Propellers) Robot: Raptor V1 Net Weight: 0.140 kg Maximum Omega: 150 rad/s (1432.4 RPM) Maximum Force: 4.7287 kg Increase: 3278% Simulator: Webots🐞 Strobe effect! 😵💫🥎🔩 #webots #downforce #Raptor #3D





Exploring #Webots simulation platform capabilities. At first glance, it looks like a cool env for prototyping. #robotics







Check out this great project integrating Boston Dynamics' Spot with ROS 2 and Webots. We are glad to see Webots being used for advanced robot simulations and support projects like this. Project link: github.com/MASKOR/webots_… #Webots #ROS2 #BostonDynamics #SpotRobot


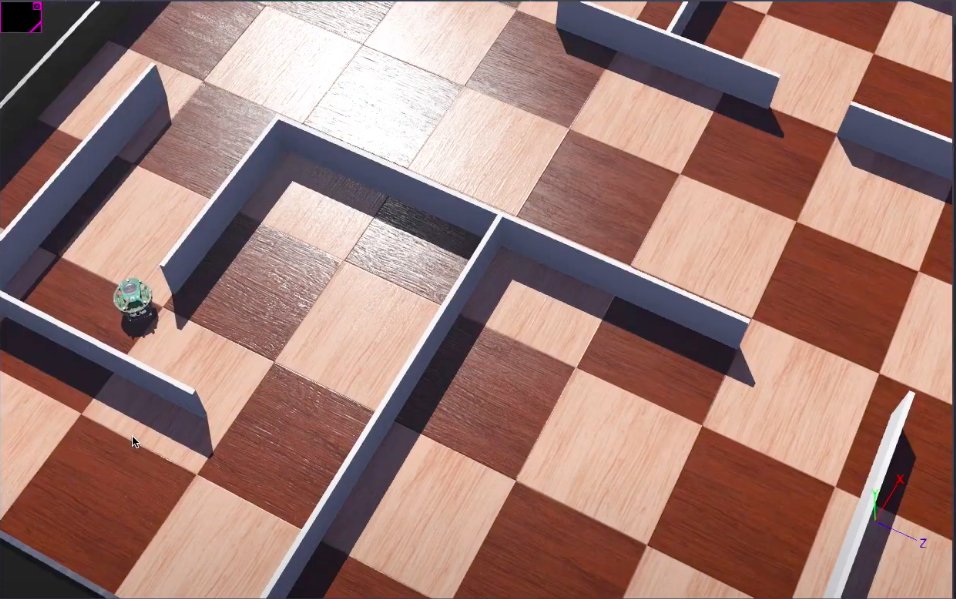
Simulation of a small robot in Webots. The controller is written in Python and uses OpenCV for line detection. #webots #Robots #OpenCV #simulation
ACD Special Test Simulator: Webots Robot: Estafette Renault V3 Navigation system: OpenCV Speed: 83 km/h #Webots #Renault #Estafette #OpenCV #Autonomous

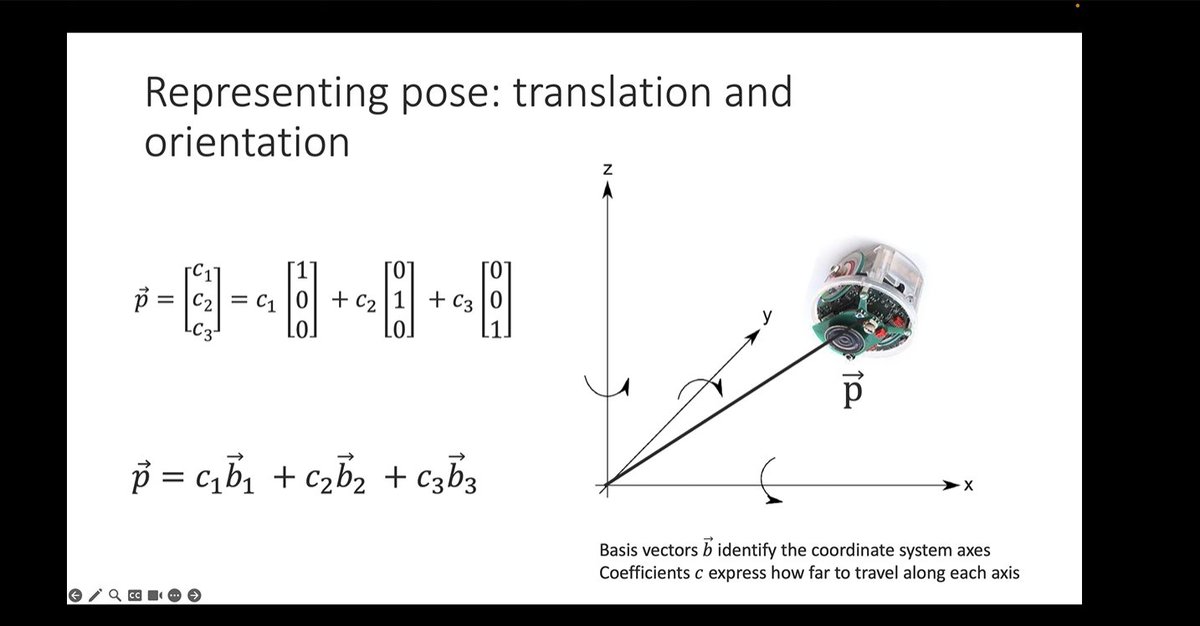
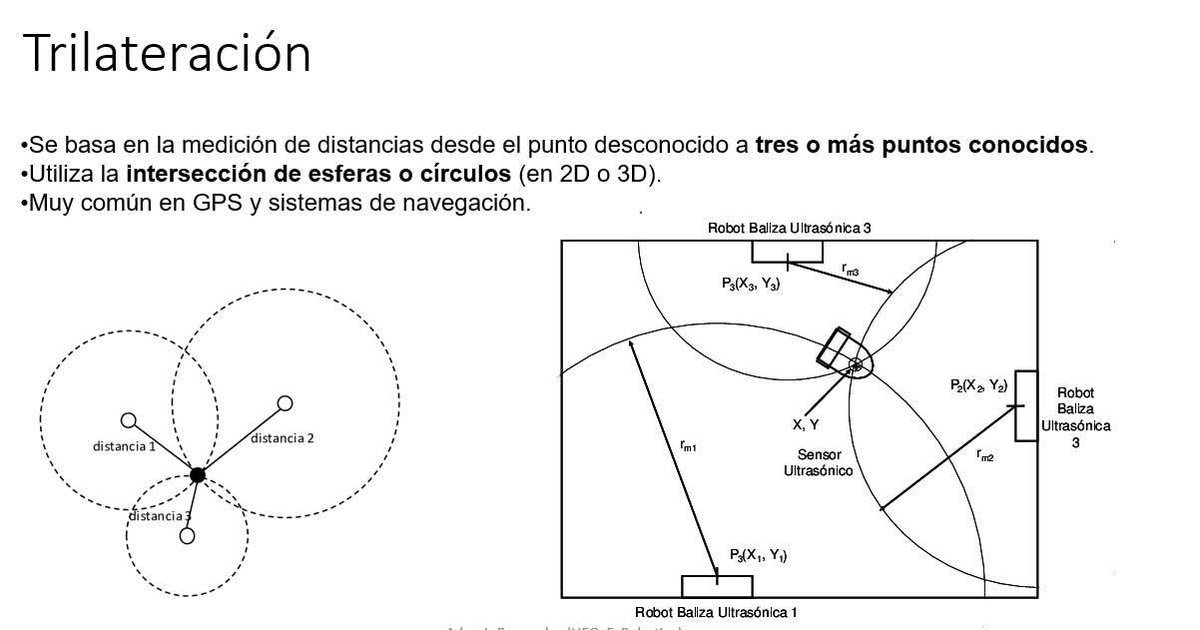
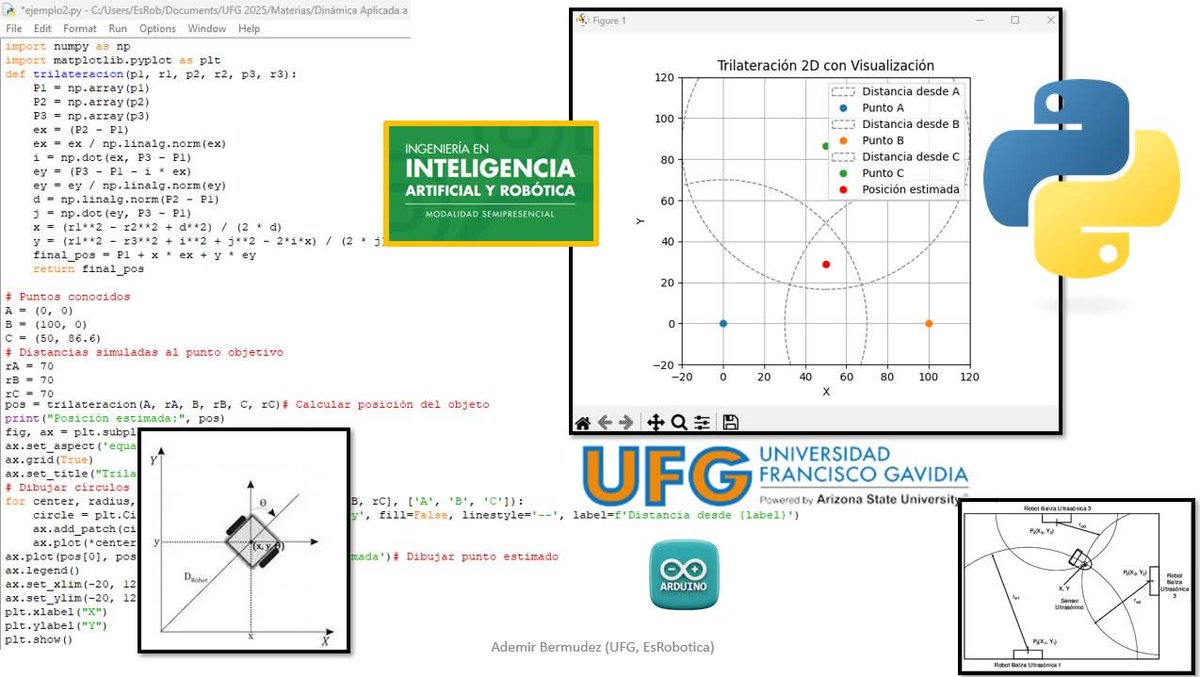
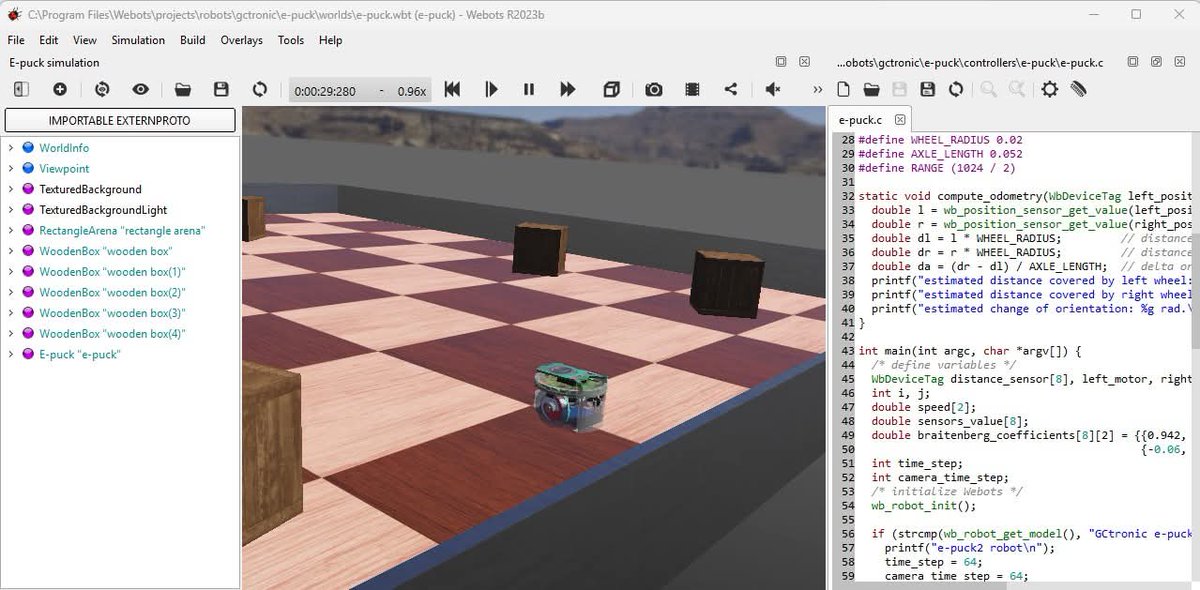
De la teoría a la practica! Dinámica aplicada a la robótica. Localización de un robot #Python, #Webots y #Geogebra
Downforce Test 2 (Two Propellers) Robot: Raptor V1 Net Weight: 0.140 kg Maximum Omega: 209.4 rad/s (2000 RPM) Static thrust: 0.00005 kg Maximum Force: 0.5873 kg Increase: 320% Simulator: Webots #webots #downforce #StaticThrust #Raptor #3D

IR Sensor Test Robot: Raptor V1 Front Sensors: 6 IR sensors in the nose Side Sensors: 1 IR sensor on each side Simulator: Webots 🐞 #webots #sensors #Raptor #3
Downforce Test (Two Propellers) Robot: Raptor V1 Net Weight: 0.140 kg Maximum Omega: 150 rad/s (1432.4 RPM) Maximum Force: 4.7287 kg Increase: 3278% Simulator: Webots🐞 Strobe effect! 😵💫🥎🔩 #webots #downforce #Raptor #3D
Latest test in Robotracer track Robot: Trilobyte (camera) Simulator: Webots Controller: Python + OpenCV Track distance: 36.8 m Lap time: 00:00:44.423 Average Speed: 0.828 m/s #webots #Trilobyte #robotracer #3D
First test in Robotracer track Robot: MiniBot (4 IR sensors) Simulator: Webots Controller: Python Track distance: 36.8 m Lap time: 00:00:47.376 Average Speed: 0.777 m/s #webots #MiniBot #robotracer #3D
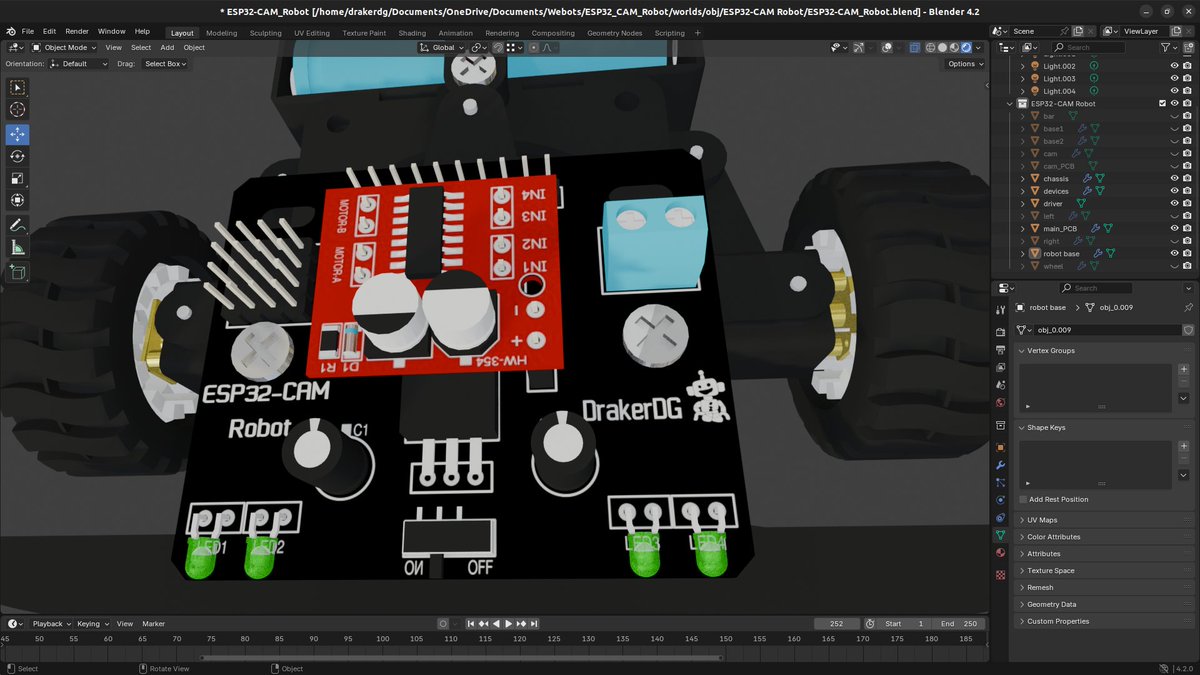
ESP32_CAM_Robot Sample of a 4WD AFRS robot capable of following the black line using image processing via OpenCV in a Python code controller. GitHub world sample: github.com/DrakerDG/Webot… #Webots #Robots #OpenCV
3 weeks into Robotics with Webots. The interface feels a bit clunky compared to game engines, but making robots is fun - feels like being a kid with new toys! ��🤖 P.S. Got parts for an RC car - soldering time soon! #robotics #webots
Simulation of a small robot in Webots. The controller is written in Python and uses OpenCV for line detection. #webots #Robots #OpenCV #simulation
Adding design improvements to lights and their configuration in the Webots simulation 🐞 #webots #robots #simulation #joystick
This is a simulation of a Mecanum-wheeled robot in Webots. I use 3D OBJ models from Tinkercad. The controls are in Python, and I use an Xbox controller. 3D model: tinkercad.com/things/4dFTwyw… GitHub Webots world: github.com/DrakerDG/Webot… #robot #tinkercad #webots #mecanum #python
Motion Test 15 Micro Chip Race! 🏁 Line Followers Robots: NE555N, LM393N, LM311N and LM358N Simulator: Webots (2X) Controller: Python with OpenCV #Webots #Robot #NE555N #LM393N #LM311N #LM358N #Python #OpenCV
Motion Test 14 Wireframe view! 🫥 Robot: NE555N Simulator: Webots 🐞 Controller: Python with OpenCV #Webots #Robot #NE555N #Python #OpenCV
Motion Test 13 Micro Chip Race! 🏁 Dangerous pursuit 💥 Line Followers Robots: NE555N, LM393N and LM311N Simulator: Webots Controller: Python with OpenCV #Webots #Robot #NE555N #LM393N #LM311N #Python #OpenCV
Motion Test 13 Micro Chip Race! 🏁 Crossing the bridge! 🕷️🕷️🕷️ Line Followers Robots: NE555N, LM393N and LM311N Simulator: Webots Controller: Python with OpenCV #Webots #Robot #NE555N #LM393N #LM311N #Python #OpenCV
Motion Test 13 Microchip Race! 🏁 Line Followers Robots: NE555N, LM393N and LM311N Simulator: Webots Controller: Python with OpenCV #Webots #Robot #NE555N #LM393N #LM311N #Python #OpenCV





Downforce Test 2 (Two Propellers) Robot: Raptor V1 Net Weight: 0.140 kg Maximum Omega: 209.4 rad/s (2000 RPM) Static thrust: 0.00005 kg Maximum Force: 0.5873 kg Increase: 320% Simulator: Webots #webots #downforce #StaticThrust #Raptor #3D
I have added some details with textures using @Blender and in the simulation in @webots I have added a top view of the track with a cursor that highlights the location of the robot. #webots #blender #ESP32_CAM_robot
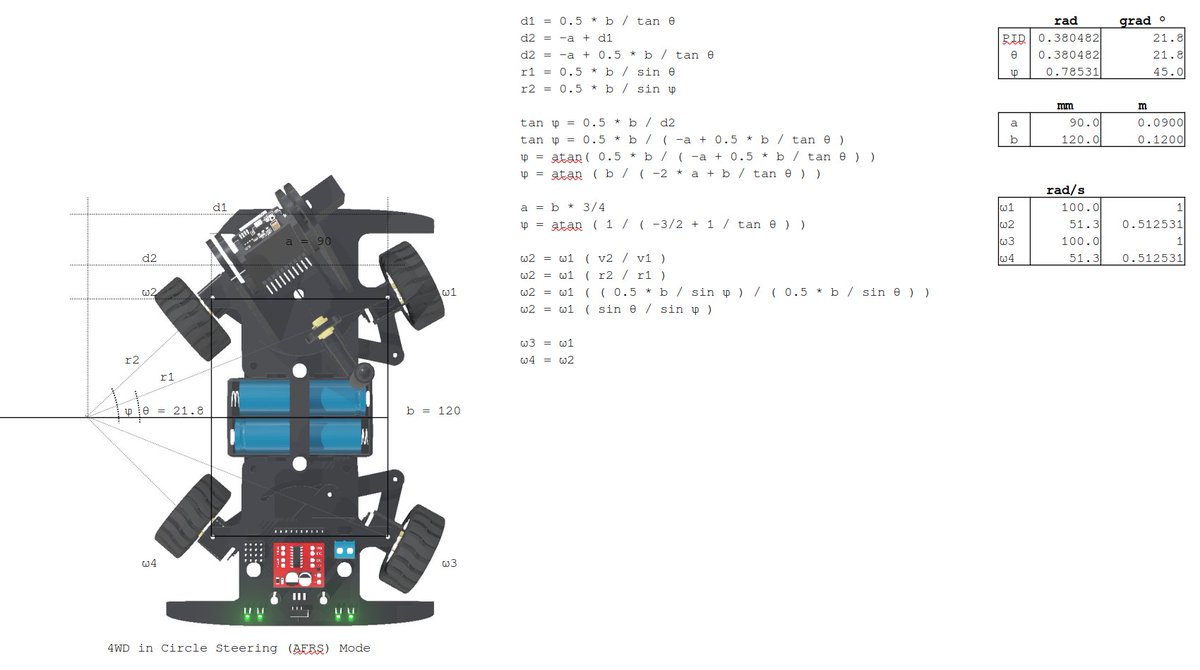
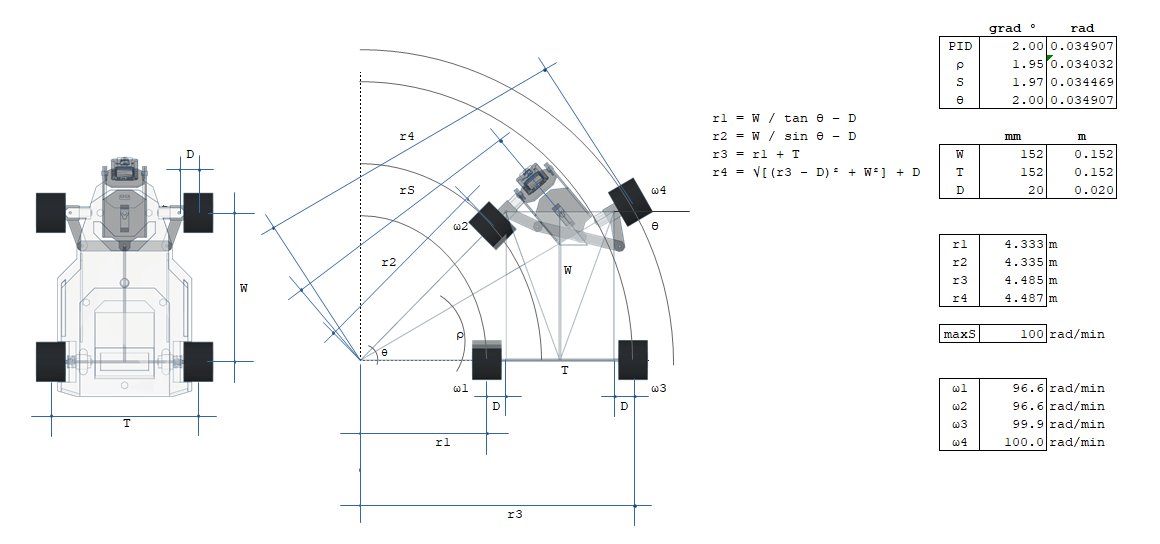
Steering analysis in double Ackermann in robot with active front and rear steering AFRS (circular turning). Design in @tinkercad and simulation in @webots. #tinkercad #webots #RescueRobot3 #opencv #python #ackermann
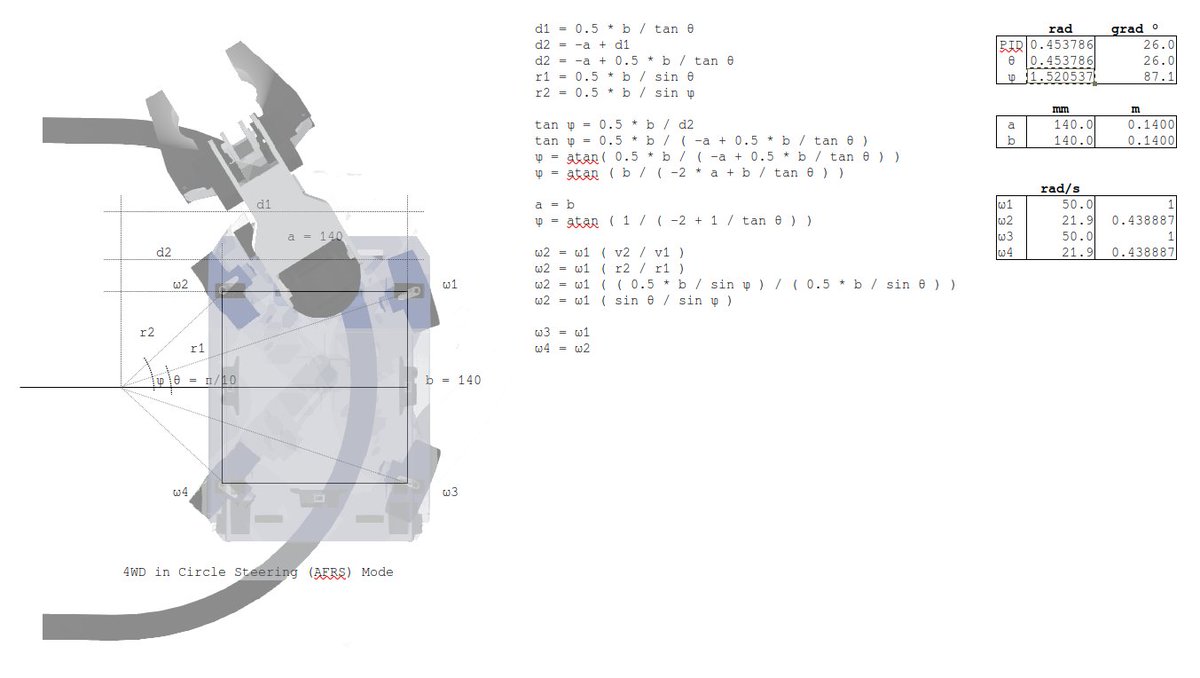
Steering analysis in double Ackermann in ESP32-CAM robot (WIP) with active front and rear steering AFRS (circular turning). Design in @tinkercad and simulation in @webots. #tinkercad #webots #ESP32_CAMrobot #python #ackermann
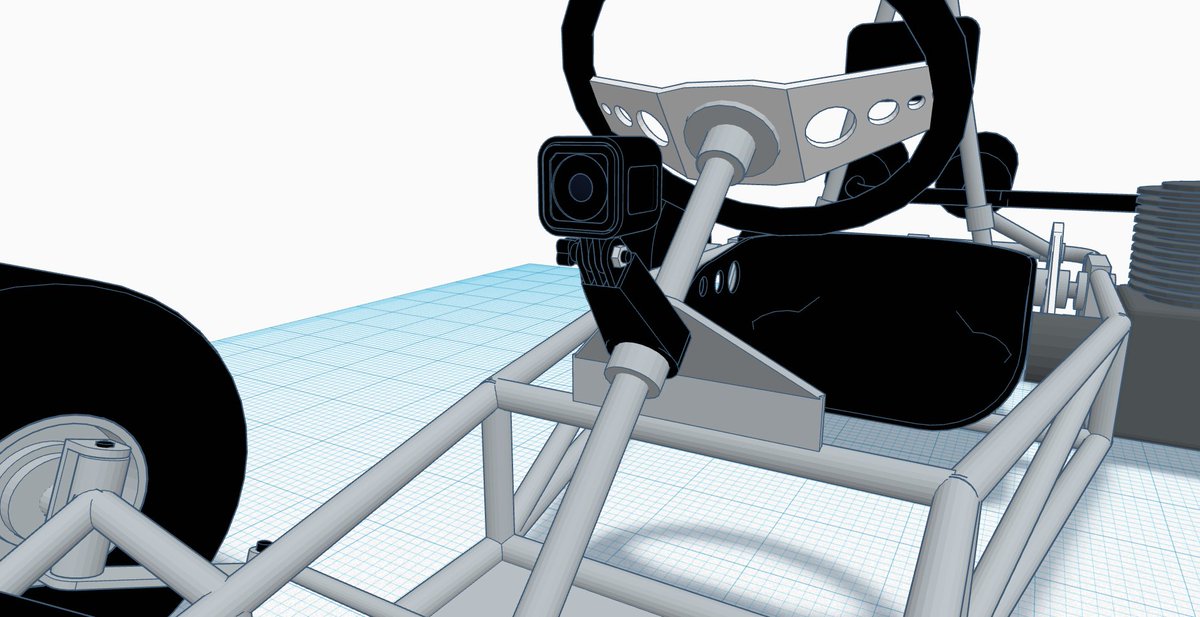
Adding GoPro camera in Tinkercad! Try it! tinkercad.com/things/dEWzUuW… Ref: #Tinkercad #Webots #GoKart

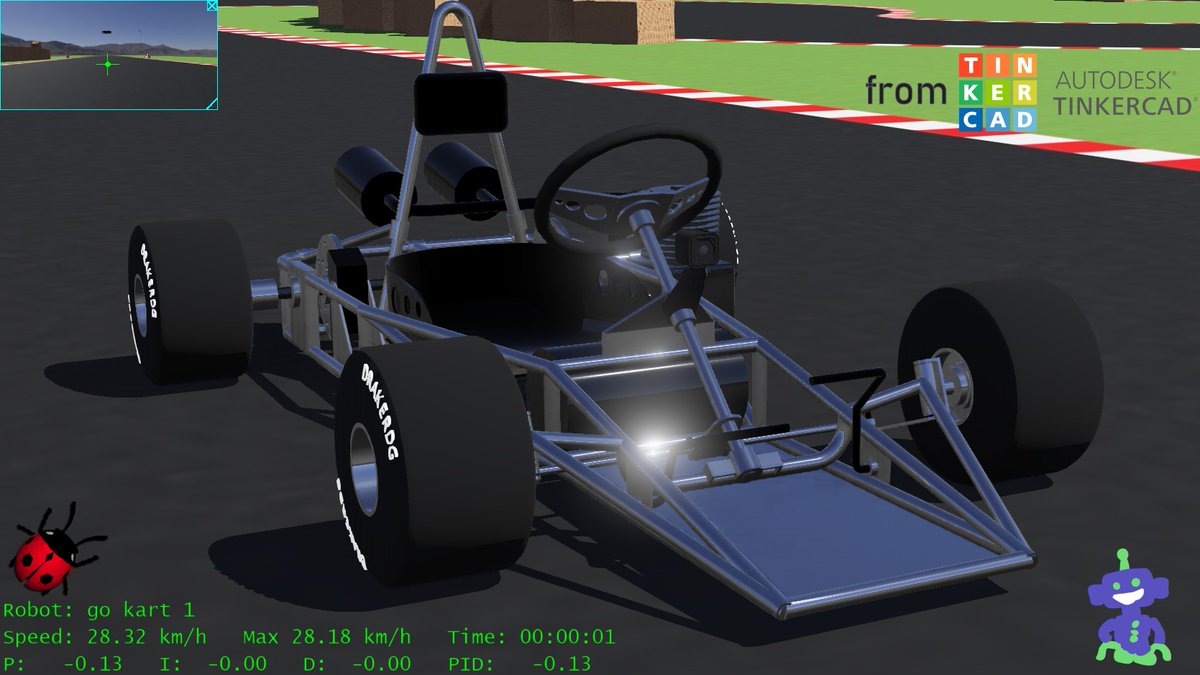
Go Kart from Tinkercad to Webots video: youtu.be/szREwlg1IJU 3D model in Tinkercad: tinkercad.com/things/dEWzUuW… Phyton Test: github.com/DrakerDG/Pytho… #tinkercad #webots #GoKart
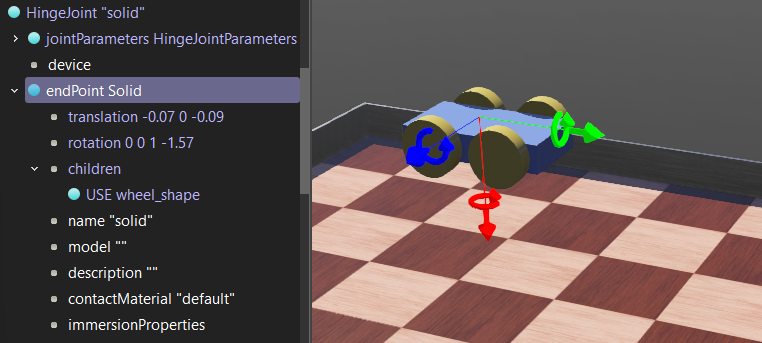
Interesting Ackermann mechanism. In simulation tests the mechanical approach works, but in this case it was necessary to slightly separate the hinge points of the steering bar and its performance improved considerably. #webots #tinkercad #robot
This is a simulation of a Mecanum-wheeled robot in Webots. I use 3D OBJ models from Tinkercad. The controls are in Python, and I use an Xbox controller. 3D model: tinkercad.com/things/4dFTwyw… GitHub Webots world: github.com/DrakerDG/Webot… #robot #tinkercad #webots #mecanum #python

Trying to import python modules returns ModuleNotFound Error stackoverflow.com/questions/6176… #python #webots #python36
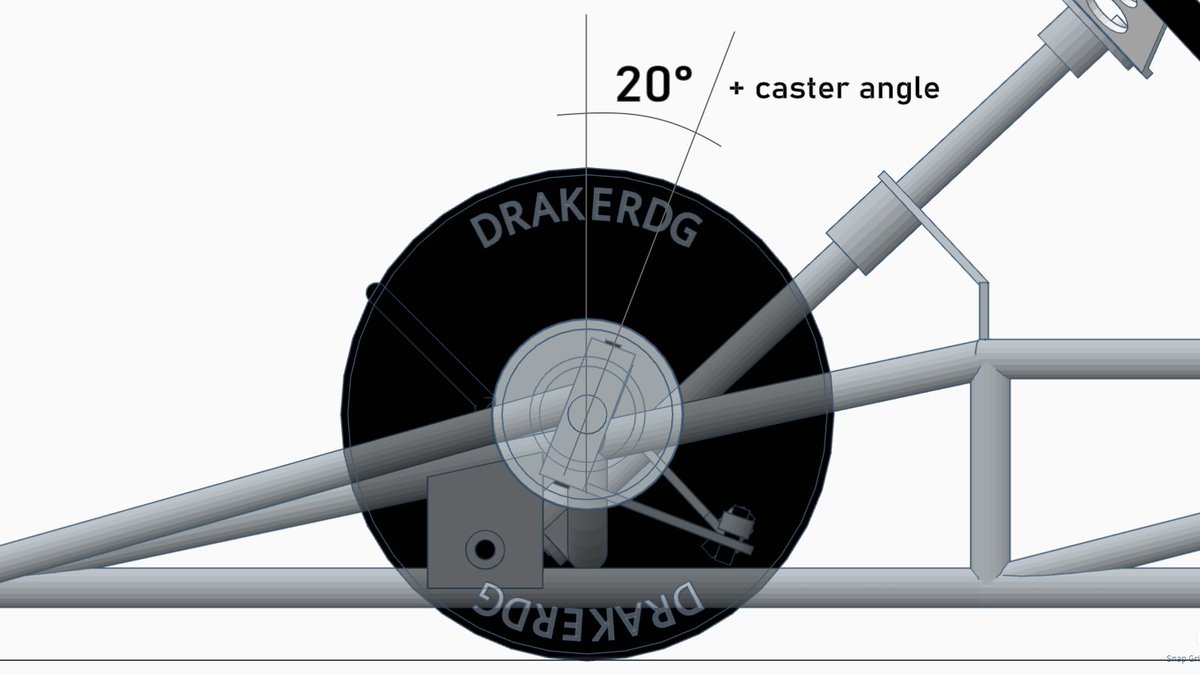
Positive caster angle effect (20°) on the rear axle to compensate for the no present of differential. Ref: #Tinkercad #Webots #GoKart
Go Kart from Tinkercad to Webots video: youtu.be/szREwlg1IJU 3D model in Tinkercad: tinkercad.com/things/dEWzUuW… Phyton Test: github.com/DrakerDG/Pytho… #tinkercad #webots #GoKart

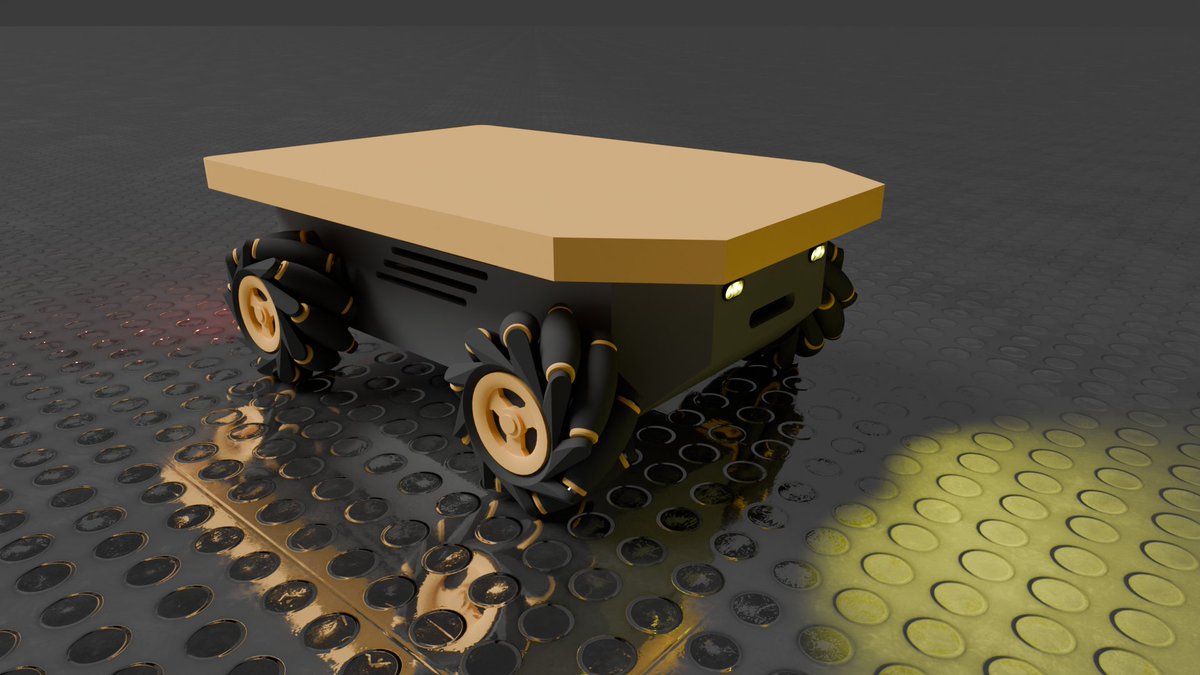
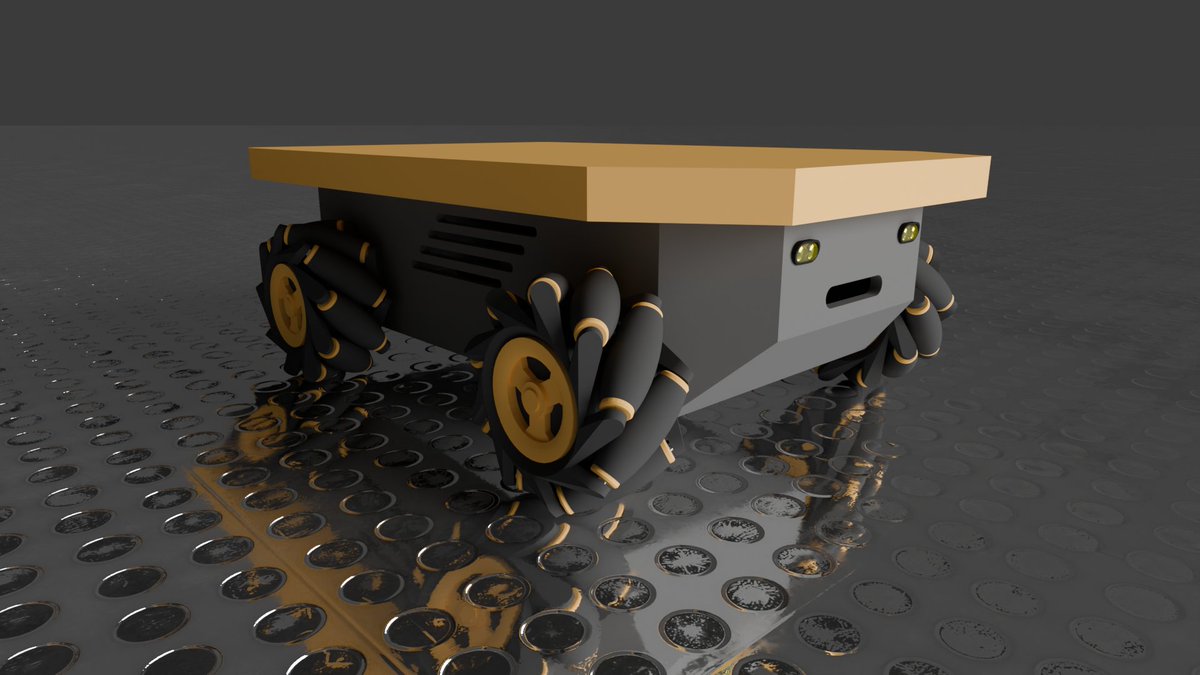
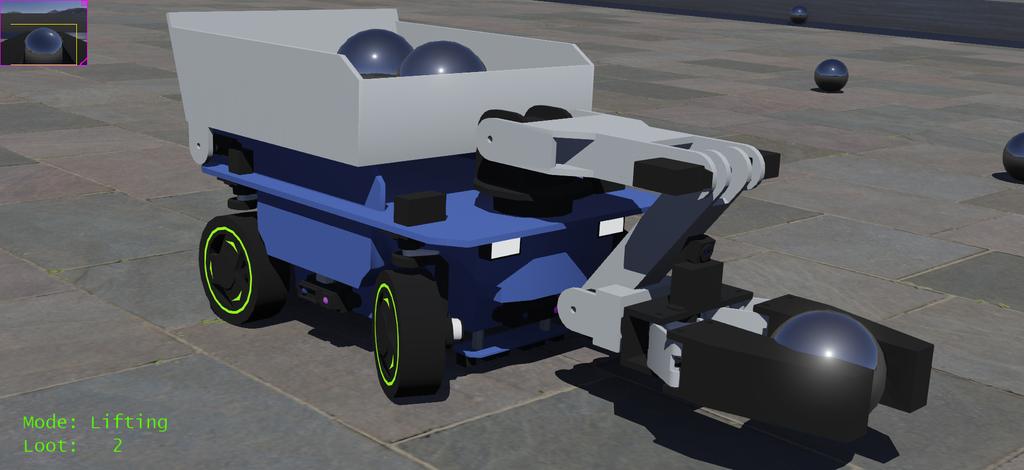
With some changes in geometry and appearance configuration (Thanks! Mr Oliver Michel), these are the new renders of my new robot in Webots. @webots #Webots #robot

#Webots R2020a released! This new release adds new robot models other than fixing several issues in particular with #AI and #ML applications. Get it now from github.com/omichel/webots… #opensource #robot #simulator


Something went wrong.
Something went wrong.
United States Trends
- 1. Good Sunday 66.1K posts
- 2. #sundayvibes 4,639 posts
- 3. Zirkzee 18.2K posts
- 4. #MUFC 16.5K posts
- 5. #CRYMUN 7,994 posts
- 6. Amorim 39.6K posts
- 7. WILLIAMEST AT EMQUARTIER 255K posts
- 8. Crystal Palace 29.4K posts
- 9. #EMAnniversaryxWilliamEst 260K posts
- 10. Stockton 31K posts
- 11. Mason Mount 5,776 posts
- 12. Licha 2,415 posts
- 13. Mateta 10.1K posts
- 14. Yoro 8,023 posts
- 15. Gakpo 6,080 posts
- 16. Duke 33.8K posts
- 17. Dalot 5,823 posts
- 18. Casemiro 6,897 posts
- 19. #BNewEraBirthdayConcert 1.39M posts
- 20. Muhammad Qasim 16.8K posts