

My goal throughout my PhD has been to take robots out of the lab and into the real world. It was so special to be a part of this effort and see this dream become reality! Excited to keep pushing model capabilities—and, of course, keep playing with robots 🤖

We got a robot to clean up homes that were never seen in its training data! Our new model, π-0.5, aims to tackle open-world generalization. We took our robot into homes that were not in the training data and asked it to clean kitchens and bedrooms. More below⤵️


If Martínez had stood there would it have scored?

Booster Robotics @boosterobotics just dropped a new humanoid soccer demo—and it’s next level. From curved free kicks to smooth step-overs, their T1 units now pull off moves like Ronaldo and block like Buffon.
I thought it was doing a new dance😂
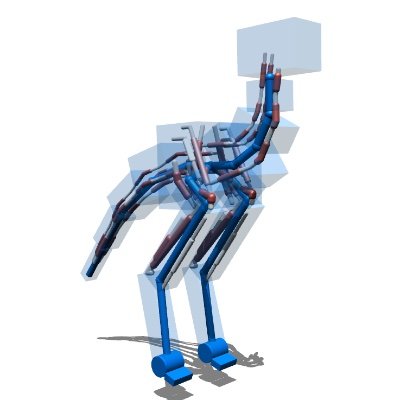
Trying to teach my new model to run using reinforcement learning (Hyfydy + depRL)
I think Phoenix is the robot that is closest to embodied AI. What do you think?

This is the same open source mission as we do,thanks to @NVIDIAAI that lead this feat!👏 huggingface.co/collections/nv…

Very intuitive demonstration

How do you teach a robot to handle complex, multi-step tasks, without training it for each one? [Github ⬇️] The team behind ReKep shows that robots can perform bimanual, in-the-wild tasks by reasoning over keypoint constraints: Generated on the fly using vision and language…

FigureAI Robots - New demo just dropped today. We have NOT seen demos like this from Optimus (or anyone else). These are fully AI-driven humanoids, not 'puppeted' by humans in a dotsuit. Only Figure's proprietary robot AI is used to reason how to put the groceries away --…


ORCA: An open-source, reliable, cost-effective, anthropomorphic dexterous hand for uninterrupted dexterous task learning. 17 degrees of freedom (16 in fingers, 1 in wrist), tendon actuated. orcahand.com


Super happy to announce that we are acquiring @pollenrobotics to bring open-source robots to the world! 🤖 Since @RemiCadene joined us from Tesla, we’ve become the most widely used software platform for open robotics thanks to @LeRobotHF and the Hugging Face Hub. Now, we’re…










































United States トレンド
- 1. #DWTS 45.8K posts
- 2. Giannis 24.2K posts
- 3. Whitney 14.5K posts
- 4. Brunson 6,864 posts
- 5. #RHOSLC 6,348 posts
- 6. Sixers 22.3K posts
- 7. Markstrom 1,407 posts
- 8. Elaine 43.7K posts
- 9. Ryan Rollins 2,435 posts
- 10. Bucks 28.3K posts
- 11. Alix 6,294 posts
- 12. UTEP 1,837 posts
- 13. #Blackhawks 2,236 posts
- 14. Connor Bedard 3,791 posts
- 15. Andy 66.9K posts
- 16. Caden 7,161 posts
- 17. #WWENXT 17.5K posts
- 18. Don Lemon 9,425 posts
- 19. Josh Hart 1,496 posts
- 20. Kuzma 1,498 posts
Something went wrong.
Something went wrong.