
We got the following award in IROS 2025: 1. Malek AbuRub, IEEE Robotics and Automation Society Japan Joint Chapter Young Award. 2. Radwa Ali, IEEE Robotics and Automation Society Japan Joint Chapter Young Award 3. Weiwei Wan, Best Reviewer Award,.
We are awarded in RSJ conference: 優秀講演賞:瀧谷,粘弾性可変なIonPadグリッパの開発 小山,XY-Z分離計測による薄型食品の高速バラ積みピッキング Wang, Finalist for International Session Best Presentation Award


Prof. Kiyokawa selected the finalist of Peter Luh Memorial Best Paper Award in IEEE CASE 2025.

ICRA 2025が始まりました。研究室からは以下の発表があります Victor H. Isume et al., “Component Selection for Craft Assembly Tasks,” Hao Chen et al., “Adaptive Grasping of Moving Objects in Dense Clutter via Global-to-Local Detection and Static-to-Dynamic Planning,”
清川拓哉助教がシグマグローバルエンジニアリングサイエンス賞を受賞されました.


ロボット学会学術講演会では、研究室から15件の発表がありました。

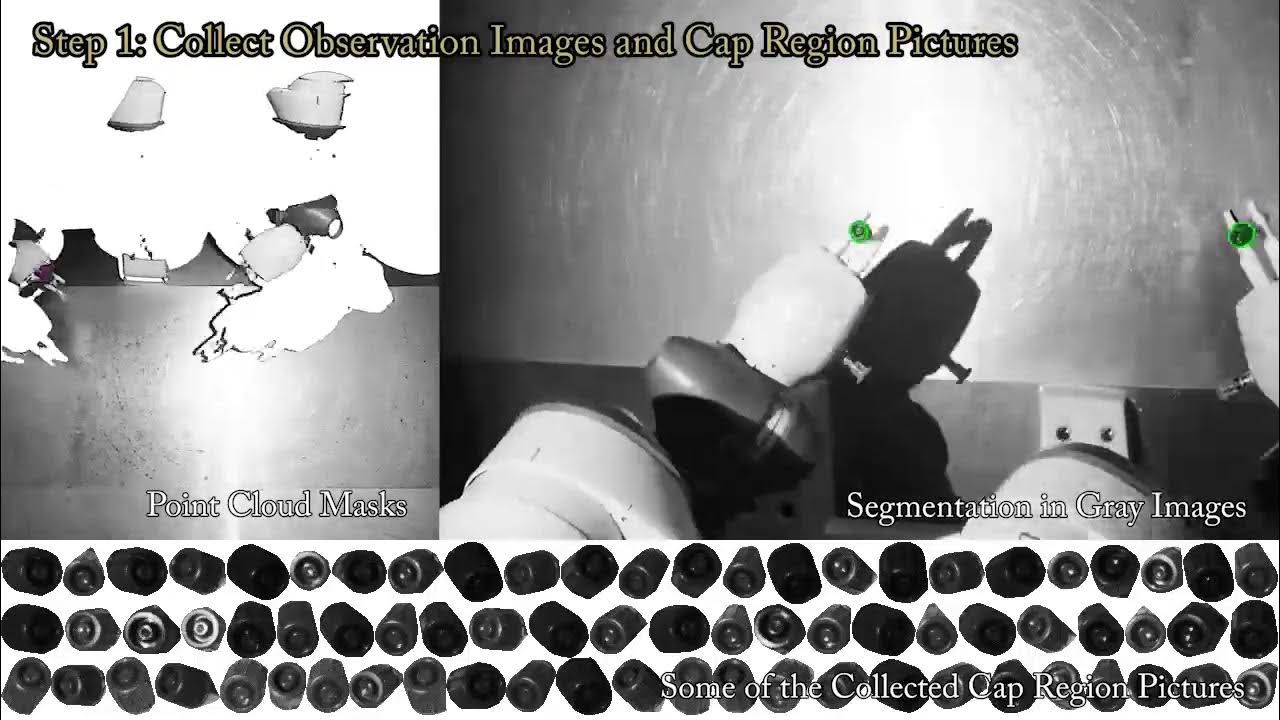
Paper published: "Automatically Prepare Training Data for YOLO Using Robotic In-Hand Observation and Synthesis" in IEEE Trans on Automation Science and Engineering ieeexplore.ieee.org/document/10239… youtube.com/watch?v=zIRgfZ…
youtube.com
YouTube
Automatically Prepare Training Data for YOLO Using Robotic In-Hand...
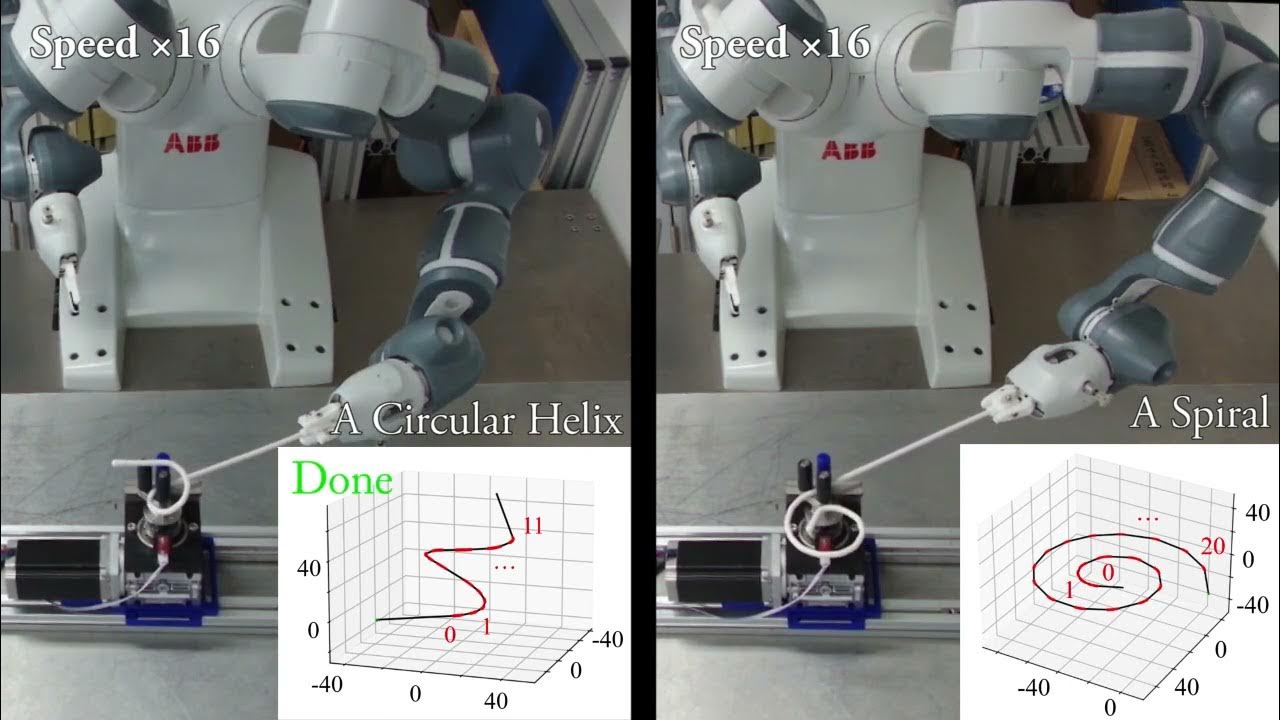
Paper published: "TAMP for 3D Curving—A Low-Payload Robot Arm Works Aside a Bending Machine to Curve High-Stiffness Metal Wires" in IEEE Trans on Automation Science and Engineering ieeexplore.ieee.org/document/10214… youtube.com/watch?v=u3PL-W…
youtube.com
YouTube
Yumi works with a machine to bend a metal wire
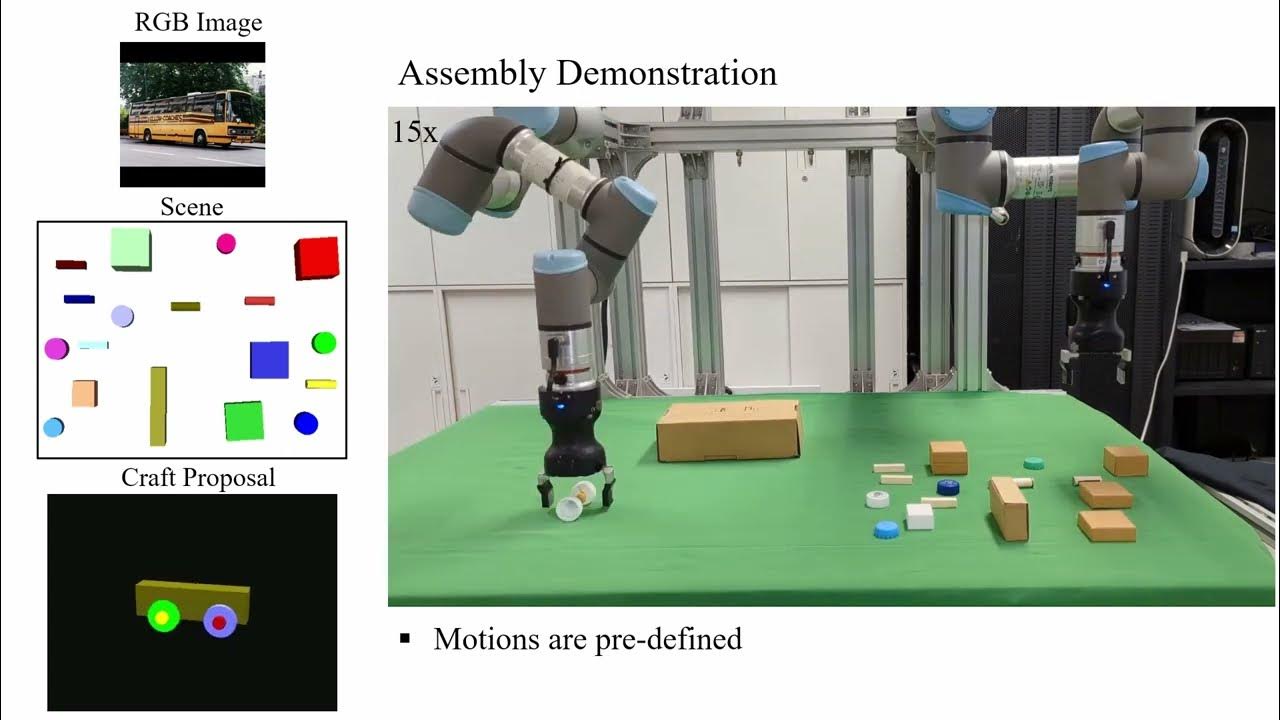
Paper published: "Component Selection for Craft Assembly Tasks" in IEEE Robotics and Automation Letter ieeexplore.ieee.org/document/10631… youtube.com/watch?v=tjz2d_… arxiv.org/abs/2407.14001
youtube.com
YouTube
Component selection for craft assembly tasks - Demo
Welcome our new research associate professor Prof. Roman Mykhailyshyn facebook.com/mykhailyshyn.r…
Dr. Kazuki Higashi was applied for the assistant professor of Higashimori lab. in the graduate school of engineering, Osaka University!



Enjoyed #ICRA2024 very much! Harada Lab had a very memorable reunion!









































































United States 트렌드
- 1. Mamdani 205K posts
- 2. Ukraine 572K posts
- 3. Egg Bowl 1,510 posts
- 4. #HMGxBO7Sweeps N/A
- 5. Putin 197K posts
- 6. Adolis Garcia 1,008 posts
- 7. #KayJewelers N/A
- 8. El Bombi N/A
- 9. DON'T TRADE ON MARGIN 1,006 posts
- 10. Geraldo 2,735 posts
- 11. #pilotstwtselfieday 1,172 posts
- 12. #FursuitFriday 14.2K posts
- 13. Anthony Joshua 5,943 posts
- 14. Happy Thanksgiving 3,883 posts
- 15. Shabbat Shalom 6,617 posts
- 16. Zelensky 128K posts
- 17. Start Cade N/A
- 18. Rapp N/A
- 19. Kenyon 2,470 posts
- 20. Tamera N/A
Something went wrong.
Something went wrong.