
Yamane Lab
@Yamane_Lab
2013年より公開アカウントに変更しました.研究や研究室などの情報やその他の情報を発信します.
You might like



















#つくばチャレンジ 2025 今年も司会進行&スタート地点のMCを担当させていただきました🎤 99チームの参加登録から、 本走行には80台が出走エントリーと 歴代最多のロボット数🤖 皆さまスタート地点ではポジティブな心意気を見せてくださり、本当にありがとうございました! #つくチャレ

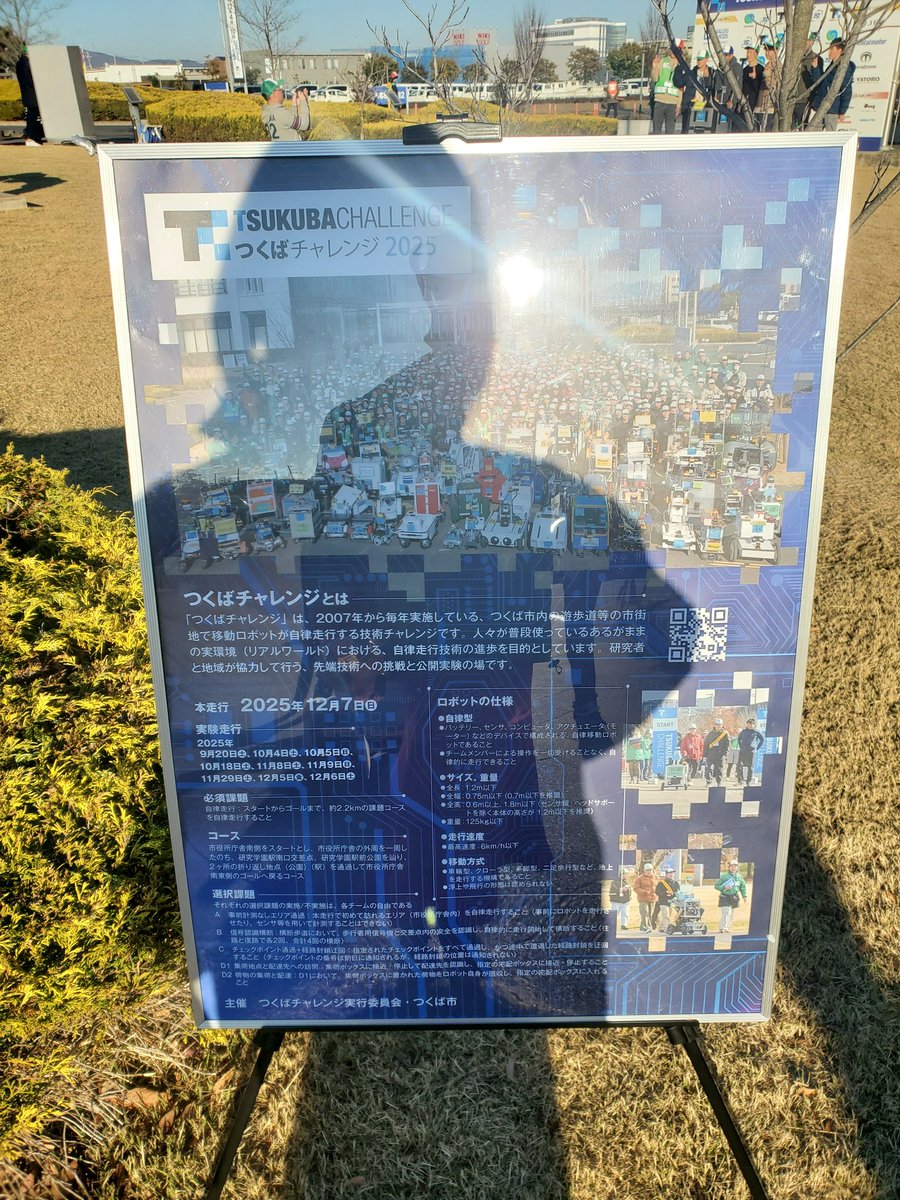


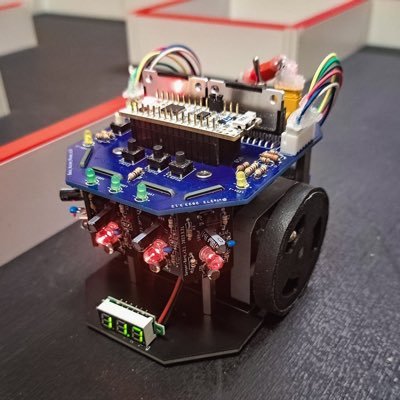
四脚車輪ロボット🦿🛞の、強化学習による独自の歩行方策で階段を登り下り! Lidar と IMU で、スタートからゴールまで約 2.8 km を自律走行。 つくばチャレンジ #つくチャレ、今週末が本走行です。
つくばチャレンジ2025 #つくチャレ 本走行の開会式です。 過去最多の79台が出走予定。全ロボットが集合! YouTube Live での配信はこちら。 tsukubachallenge.jp/2025/records/f…



つくばチャレンジ2025 #つくチャレ 本走行、3年連続で完走しました🎉✨ ここ2年は四脚ロボット(Unitree Go1, Go2)での完走でしたが、今年は四脚車輪ロボット(Go2-W)での完走です! コースにある3つの階段を登り下りし、林の中の落葉で埋まった道も走破して、約 2.8 km を自律走行しました。



つくばチャレンジ本走行しました! スタート時の配信の様子はこちら👇️👇️👇️ #つくチャレ #つくばチャレンジ #ロボット #terakatarobotics m.youtube.com/watch?v=aZMiwy…

youtube.com
YouTube
つくばチャレンジ2025本走行ライブ配信(Tsukuba Challenge 2025)




#ROBOMECH2025 つくばチャレンジ2024 #つくチャレ 技術調査報告を発表します! 6/6(金) 10:50~12:20「移動ロボット~ (2/2)」セッション、講演番号 2A2-R09 原 祥尭, 萬 礼応, 冨沢 哲雄, 伊達 央, 大川 一也, 大矢 晃久, "つくばチャレンジ2024全チームの技術動向調査" docswell.com/s/ystk_hara/Z2…

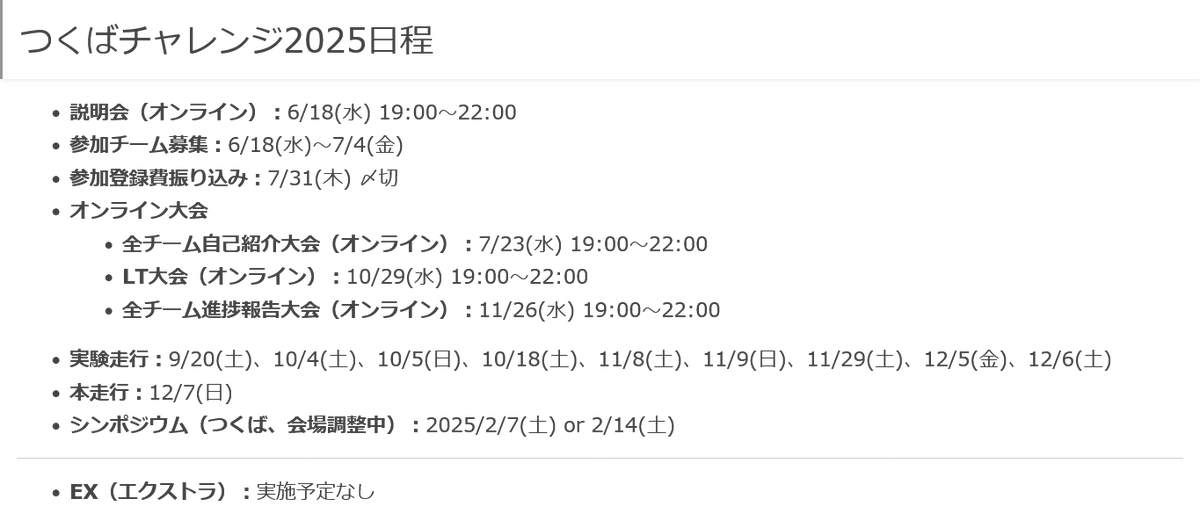
つくばチャレンジ2025 #つくチャレ の日程を公開しました! 今年度の説明会を 6/18(水) 19:00~ に開催します。皆さま、ぜひご参集ください! tsukubachallenge.connpass.com/event/356621/ なお、つくばチャレンジ2025 Web サイト(課題など)の公開は、説明会当日です。ご了承ください。

MAC-VO: Metrics-Aware Covariance for Learning-based Stereo Visual Odometry TL;DR: learning-based stereo; learned metrics-aware matching uncertainty for dual purposes: selecting keypoint and weighing the residual in pose graph optimization.












































![Rakuro's profile picture. 脳の情報処理メカニズムや人間機械系が気になって寝られません.[Skype: rakuromoon]](https://pbs.twimg.com/profile_images/1375701564/mini.jpg)









![aiwolf_org's profile picture. ゲーム「汝は人狼なりや?」(人狼)をエージェントプログラム同士で対戦可能な環境を提供することで、人狼ゲームを対象とした人工知能の課題への挑戦を行うプロジェクトです。 gm: gm[_at_]aiwolf[dot]org 人工知能トップの国際会議IJCAIにおける人狼知能コンテストが決定しました。スポンサー募集中](https://pbs.twimg.com/profile_images/600205060954456064/_098Rdp7.jpg)














![jsai_ml's profile picture. 人工知能学会メーリングリスト公式アカウントです。各つぶやきに記載されているURLから詳細を閲覧できます。 [ 人工知能学会 http://t.co/0pB8PapC ] [ MLアーカイブ一覧 http://t.co/8YbIu5AJ ]](https://pbs.twimg.com/profile_images/1782781384/jsaiann.png)










United States Trends
- 1. #Crew11 N/A
- 2. Hobbs N/A
- 3. #SpaceX N/A
- 4. Dragon N/A
- 5. Walt N/A
- 6. #NYGiants N/A
- 7. Hubert N/A
- 8. #AEWDynamite N/A
- 9. Mike Brown N/A
- 10. AJ Dybantsa N/A
- 11. Jalen Brunson N/A
- 12. #Zetarium N/A
- 13. Stanford N/A
- 14. Deadpool N/A
- 15. Koa Peat N/A
- 16. Mayhem N/A
- 17. AI Summary N/A
- 18. NFC East N/A
- 19. Ebuka Okorie N/A
- 20. Darby N/A
You might like
-
 RUM@統計検定1級全分野制覇
RUM@統計検定1級全分野制覇
@DS_gauss -
 マクニカ スマートシティ&モビリティ事業部
マクニカ スマートシティ&モビリティ事業部
@MacnicaMobility -
 NewIsland
NewIsland
@niijima_shun -
 yuha よねちゃん
yuha よねちゃん
@yuha_kome -
 論理学初心者 Logic beginner
論理学初心者 Logic beginner
@ronri_logic -
 TK (元機械工学研究部)
TK (元機械工学研究部)
@angelbeatus_tk -
 Tomohiko FURUTANI
Tomohiko FURUTANI
@to_furutani -
 もりゅー
もりゅー
@Moryu_io -
 おいなり
おいなり
@Ml07Sat -
 JYERIKO
JYERIKO
@ringigo82 -
 しゅんNOSUKE
しゅんNOSUKE
@yokkorrashot -
 Color/Image/Face
Color/Image/Face
@ColorImageFace -
 aoi
aoi
@aoi_aoi_t -
 つぶあんしかかたん
つぶあんしかかたん
@yszw_0223 -
 southVillage
southVillage
@okakim55
Something went wrong.
Something went wrong.