
Jason Kim
@jsonbot117
🔥#Legged_Robot_SLAM, State Estimation & Locomotion🔥Open Source Robotics / URobotics research team
You might like

















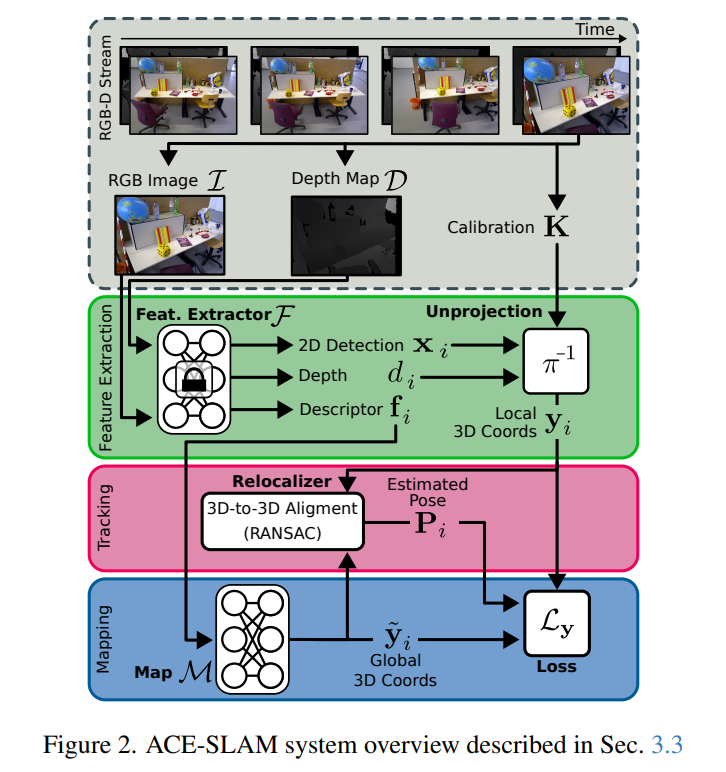
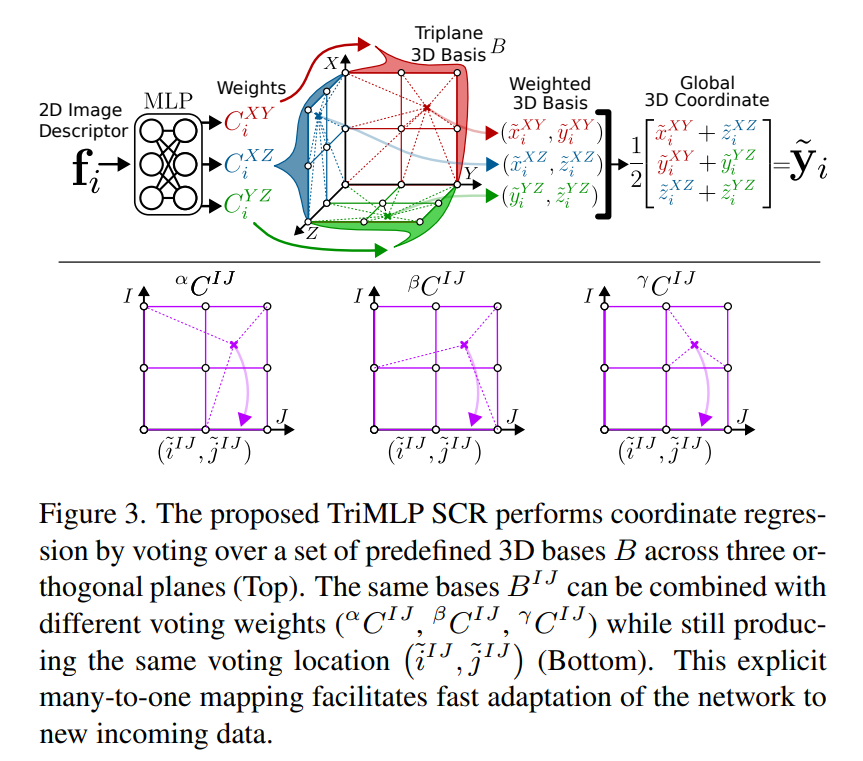
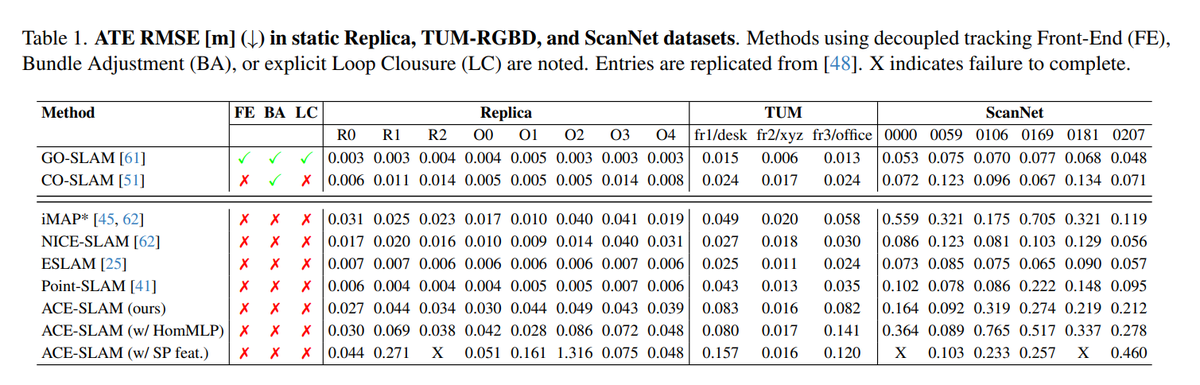
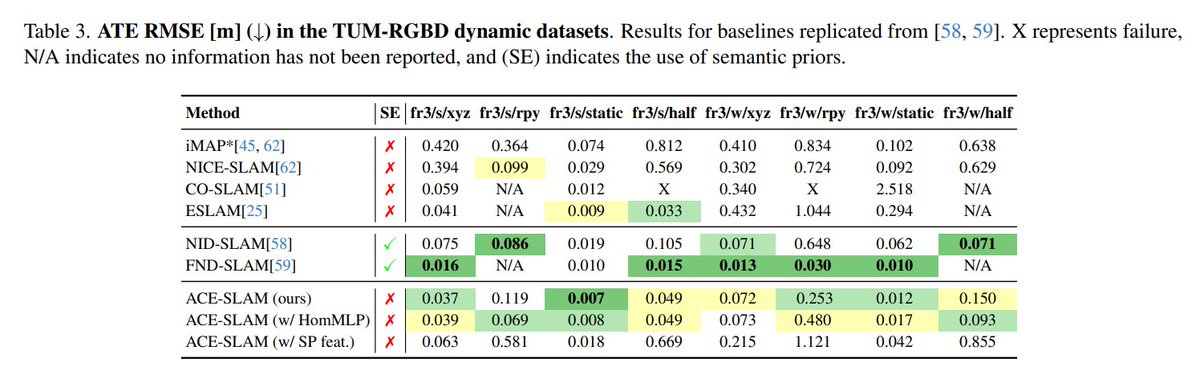
ACE-SLAM: Scene Coordinate Regression for Neural Implicit Real-Time SLAM @alzugarayign, @marwan_ptr, @AjdDavison tl;dr: in title; ACE+SLAM arxiv.org/abs/2512.14032

The Ornstein–Uhlenbeck (OU) process is a mean-reverting stochastic process that models how a quantity fluctuates randomly while being pulled back toward a long-term average. It solves a linear stochastic differential equation combining drift toward equilibrium with Gaussian…


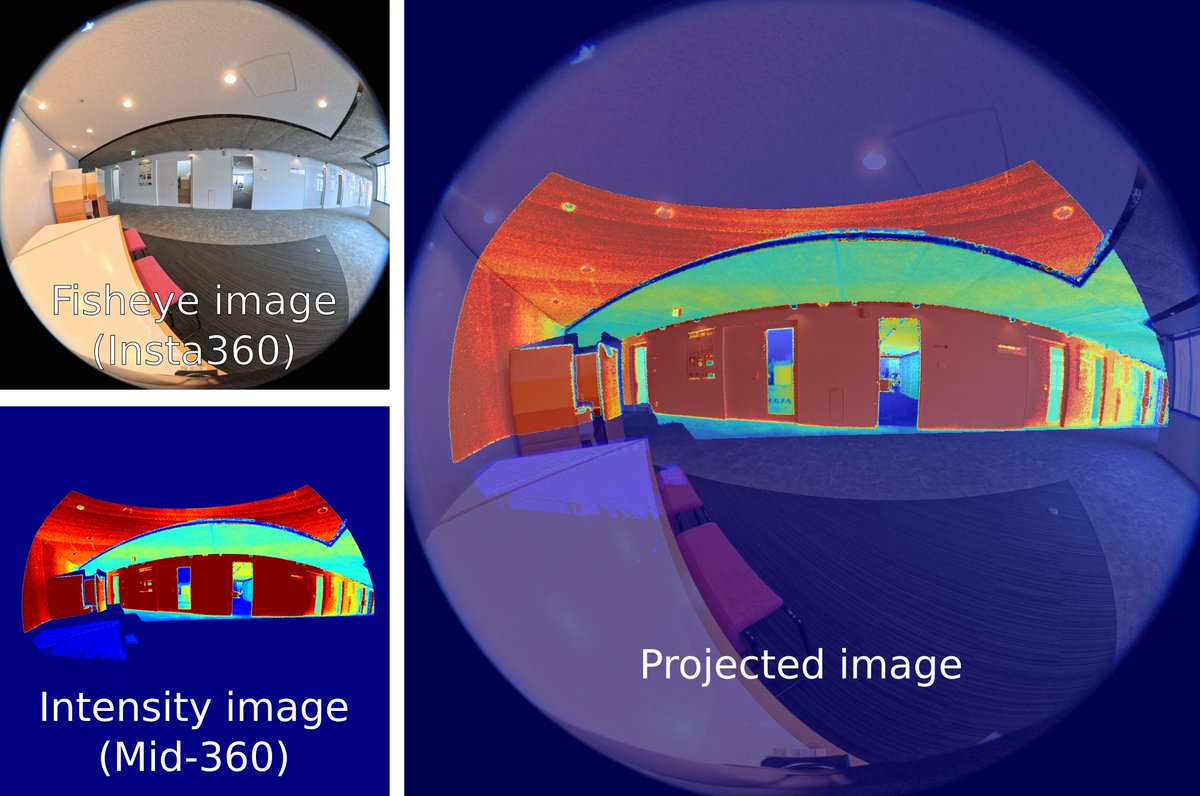
明後日から開催の #SI2025 で2件発表します。 ・LiDAR SLAMを活用したGaussian Splattingモデルを用いて単眼カメラのみでLiDAR級の位置推定を行う手法 ・そのために構築したLiDAR-カメラシステムの内部・外部パラメータ同時キャリブレーション手法 10日/1D7-17&18で発表です。ご興味ある方はぜひ!

Just coming back from NeurIPS, last one I went to was in 2022. Kinda shocked at the amount of research that was essentially just fiddling with existing large models. Really sad stuff.

This is my whole point- the locomotion looking “solved” is a mirage. All they can do is playback prerecorded references, but the method being shown isn’t steerable. As currently demonstrated, you can’t use that run for useful work at all. It’s just a slick demo.

Currently most bots locomotion and manipulation are too slow to be useful. Now that locomotion looks solved the hard part starts: manipulation

🚀 We're releasing a browser-based platform for playing robot policies. No installation. No setup. Just open the URL. ✨ Features: • MuJoCo physics simulation (real-time) • ONNX policy inference in-browser • 1.2M+ episodes tested

🧠 Robotic World Model (RWM) and Model-Based Policy Optimization with PPO (MBPO-PPO) are fully open-sourced! ⛓️ Integrated as IsaacLab and RSL-RL extensions, compatible with other development from @leggedrobotics. ⭐️ Check out now! ⭐️ github.com/leggedrobotics…

form FORM is a LiDAR Odometry system that performs fixed-lag smoothing and sub-map reparations, all in real-time with minimal parameters. github.com/rpl-cmu/form


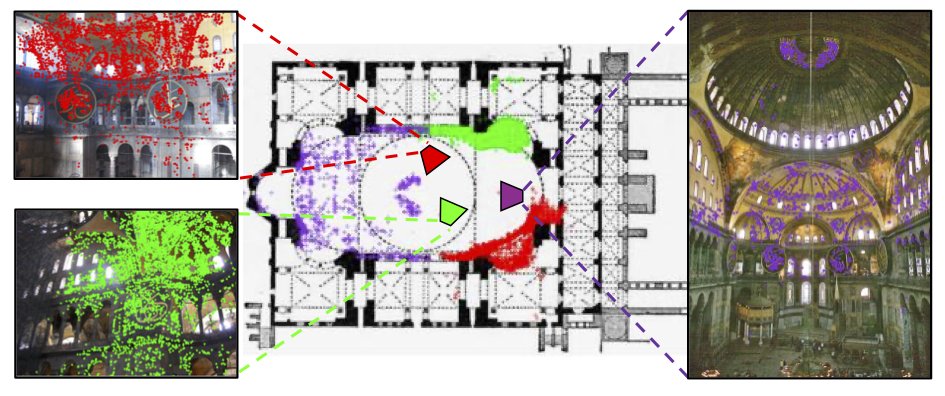
1/5 Humans are able to look at their surroundings and pinpoint their location on a map, even for totally new buildings. Can computer vision systems do the same? 🤖🗺️ We explore this In our #NeurIPS2025 paper - C3Po: Cross-View Cross Modality Correspondence by Pointmap Prediction.
Kinda getting interested in this

We’re giving two robot dogs or $10k to any successful full time referrals! Send us relentless hackers who want to build and deploy on humanoids, quadrupeds, wheeled bots, drones. DM or email [email protected]

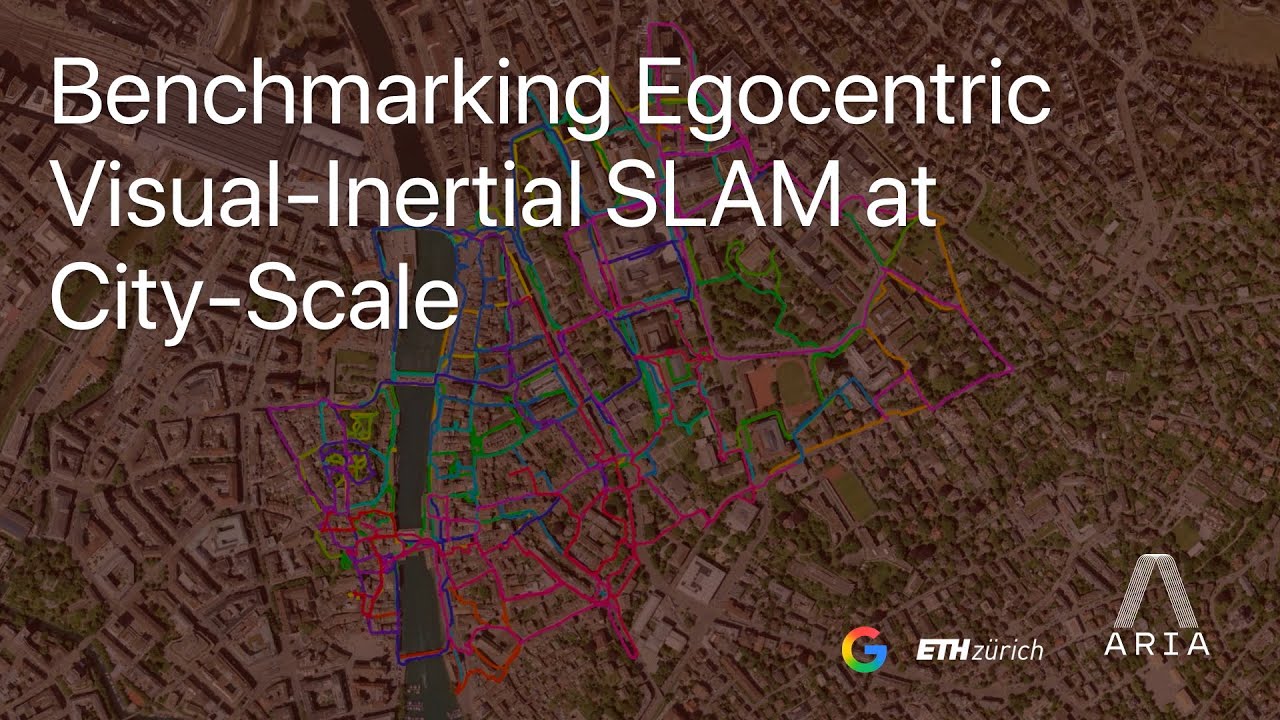
I actually found a really good deep dive on this from one of the meta engineers from a iccv recording that folks might be interested in youtu.be/HD_eACowqW4?si…
youtube.com
YouTube
Project Aria at ICCV 2025 - Benchmarking Egocentric Visual-Intertial...

Robot learning people suddenly realizing that SLAM/VIO being the biggest moat for data collection was in fact in my bingo card for 2025/2026.
An Introduction to Flow Matching and Diffusion Models arxiv.org/pdf/2506.02070 Flow Matching Guide and Code arxiv.org/pdf/2412.06264 Diffusion Models and Gaussian Flow Matching: Two Sides of the Same Coin d2jud02ci9yv69.cloudfront.net/2025-04-28-dif…

WE'RE HIRING for Members of Technical Staff, Forward deployed, and developer growth roles. Robotics experience not required for about half of our open roles. DM or email [email protected]

Nicolas Mansard: in locomotion / legged motion, when we worked on MPC (model predictive control) we were a team of 10 working on the robot and it barely worked. Now with RL (Reinforcement Learning) a single student can get a policy in 3 months, including training of the student.



SLAM for large-scale scenes Accurate visual geometry estimation improves SLAM performance. DA3 significantly reduces drift in large-scale environments, even better than COLMAP, which takes more 48 hours to complete. 👇(3/n)

Inside a real-time 3D mapping system! 🧭 That's how modern home bots map and localize using only cameras. @maticrobots is using voxel-based neural networks running on NVIDIA Jetson Orin to build real-time, photorealistic 3D maps of the world around its robots. Its autonomy…










































































United States Trends
- 1. Steelers 76.5K posts
- 2. Mark Andrews 3,918 posts
- 3. Lamar 20.4K posts
- 4. Ravens 32.7K posts
- 5. Lions 86.1K posts
- 6. #Married2Med 3,186 posts
- 7. Derrick Henry 3,959 posts
- 8. Drake Maye 7,938 posts
- 9. Toya 5,362 posts
- 10. #RHOP 5,648 posts
- 11. Jags 15.8K posts
- 12. Henderson 11.7K posts
- 13. Broncos 37.1K posts
- 14. #HereWeGo 9,313 posts
- 15. #BaddiesUSA 5,468 posts
- 16. Contreras 10.9K posts
- 17. Goff 9,042 posts
- 18. Nicki Minaj 144K posts
- 19. Teslaa 3,312 posts
- 20. #Patriots 3,228 posts
You might like
-
 Deni 🖥️
Deni 🖥️
@awesomedev_Deni -
 Zhengxiao Han
Zhengxiao Han
@serious0nhc -
 HACUIT
HACUIT
@_Happy_Circuit -
 XNH
XNH
@xnhxnhxnhxnhxnh -
 크썸
크썸
@twoo0220 -
 쫑구
쫑구
@zzong_gu -
 가람🌈
가람🌈
@garam_withtulip -
 𐂂이대은🎄(Dae-eun Lee)
𐂂이대은🎄(Dae-eun Lee)
@2daeeun -
 wec
wec
@howtostudyRF -
 LarissaCloud🕯
LarissaCloud🕯
@larissacloud__ -
 Hosung Joo
Hosung Joo
@whendoyoucome -
 감자
감자
@drumstickbear -
 성큼 개발계
성큼 개발계
@sungkm_dev -
 dev_c10aking
dev_c10aking
@c10aking -
 헌천수
헌천수
@podsjw
Something went wrong.
Something went wrong.