
你可能會喜歡















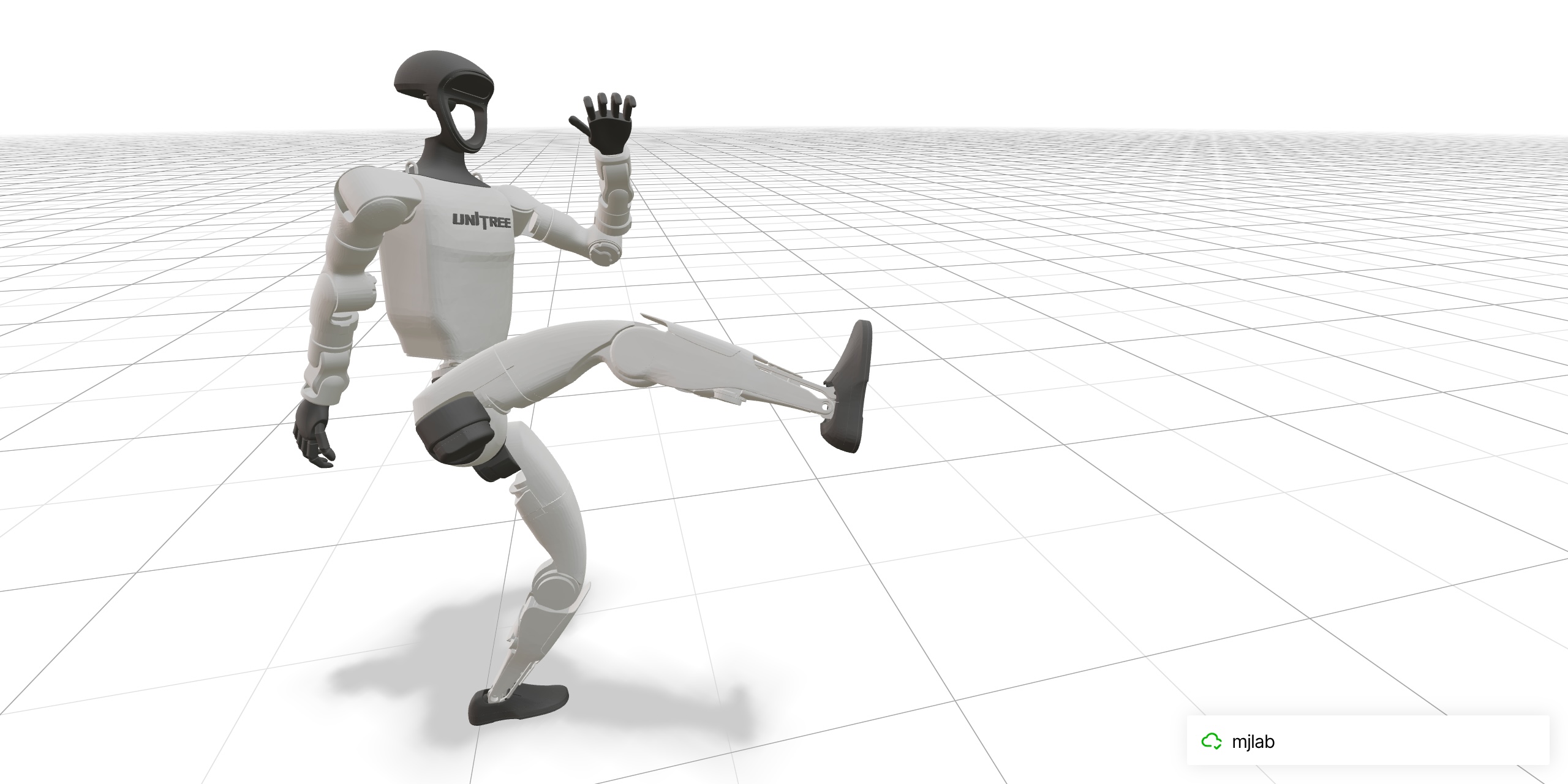
It was a joy bringing Jason’s signature spin-kick to life on the @UnitreeRobotics G1. We trained it in mjlab with the BeyondMimic recipe but had issues on hardware last night (the IMU gyro was saturating). One more sim-tuning pass and we nailed it today. With @qiayuanliao and…

Implementing motion imitation methods involves lots of nuisances. Not many codebases get all the details right. So, we're excited to release MimicKit! github.com/xbpeng/MimicKit A framework with high quality implementations of our methods: DeepMimic, AMP, ASE, ADD, and more to come!

Trained my first dancing policy and deployed it with mjlab this week! Thank you for the incredible work!
We open-sourced the full pipeline! Data conversion from MimicKit, training recipe, pretrained checkpoint, and deployment instructions. Train your own spin kick with mjlab: github.com/mujocolab/g1_s…
We've also upgraded the viser viewer in mjlab. You can now track your robot, visualize contact points and forces and change the FOV. This wouldn't have been possible without @brenthyi !
Underrated perk of strict typing: agents get instant feedback from the type checker, so they self-correct and give me correct, runnable code way more often :)
I forgot to mention: mjlab is fully typed and passes type checking with pyright. Been super helpful for catching bugs before running any code.

Had a great time playing with and integrating mjlab into HDMI (github.com/LeCAR-Lab/HDMI…). Learned a lot of fancy mujoco tricks from @kevin_zakka's super clean code. Love seeing parrallel envs in mujoco! Also feel free to play with our sim2real code (github.com/EGalahad/sim2r…)!
Our experience using mjlab has been quite similar: ~2x speedup over Isaac Lab when using objects 🙂
Performance-wise mjlab is faster by about 2x to isaaclab. (green and purple lines being mjlab). Without object, isaaclab and mjlab is actually similar in my case, but isaaclab slows down by 2x when object is included.


We're growing the uv team! uv is one of the fastest-growing developer tools ever, built and maintained by a small, talented team :) Write Rust, for Python. Full-time, open source, remote. We're very well-funded and in it for the long haul. Link in next tweet 👇 or DM me here.
Compared to the JAX backend, it's much faster. There's things you can't even compile with MJX and it's no problem for mjwarp. For example, mjlab supports rough terrains (not possible in mjx):

Of course mjlab supports the native MuJoCo viewer. Makes it a breeze to pause, slow down, inspect contacts, perturb the robot, etc. There's also a brand new pane for reward visualization :)
BTW, the robot falls over after the cartwheel because the reference motion ends. Also all these motion imitation policies were trained with 0 domain randomization :)
I'm super excited to announce mjlab today! mjlab = Isaac Lab's APIs + best-in-class MuJoCo physics + massively parallel GPU acceleration Built directly on MuJoCo Warp with the abstractions you love.







































































































United States 趨勢
- 1. Auburn 43.4K posts
- 2. Brewers 60.9K posts
- 3. Georgia 66.4K posts
- 4. Cubs 54K posts
- 5. Kirby 23K posts
- 6. Arizona 40.8K posts
- 7. Michigan 61.7K posts
- 8. Hugh Freeze 3,100 posts
- 9. #GoDawgs 5,444 posts
- 10. #BYUFOOTBALL N/A
- 11. Boots 49.6K posts
- 12. Kyle Tucker 3,077 posts
- 13. Gilligan 5,430 posts
- 14. Amy Poehler 3,586 posts
- 15. #ThisIsMyCrew 3,175 posts
- 16. Tina Fey 2,630 posts
- 17. #MalimCendari3D 3,397 posts
- 18. Jackson Arnold 2,151 posts
- 19. #Toonami 1,710 posts
- 20. Utah 22.9K posts
你可能會喜歡
-
 Karol Hausman
Karol Hausman
@hausman_k -
 Sasha Rush
Sasha Rush
@srush_nlp -
 Deepak Pathak
Deepak Pathak
@pathak2206 -
 Danijar Hafner
Danijar Hafner
@danijarh -
 Abhishek Gupta
Abhishek Gupta
@abhishekunique7 -
 Jascha Sohl-Dickstein
Jascha Sohl-Dickstein
@jaschasd -
 Animesh Garg
Animesh Garg
@animesh_garg -
 Sergey Levine
Sergey Levine
@svlevine -
 Chelsea Finn
Chelsea Finn
@chelseabfinn -
 Eric Jang
Eric Jang
@ericjang11 -
 Jacky Liang
Jacky Liang
@jackyliang42 -
 Dhruv Batra
Dhruv Batra
@DhruvBatra_ -
 Fei Xia
Fei Xia
@xf1280 -
 Jakob Foerster
Jakob Foerster
@j_foerst -
 Pulkit Agrawal
Pulkit Agrawal
@pulkitology
Something went wrong.
Something went wrong.