#physicalprogramming 搜尋結果

Amazing potential for #ProgrammableMaterials "#PhysicalProgramming of freeform folding… bit.ly/1OGTOVP

Massive success in @codeclubbefs tonight! #physicalprogramming #python #coding #soimpressed #flashingLED 🔴✔️

Another superb day delivering our @bsp_london Brent Computing CPD & Networking SPRING course with @duck_star. Check out the 🧵 to see pics from our sessions on #CyberSecurity #AIinEducation and Whole School #PhysicalProgramming using @intelino Smart Train. ⬇️⬇️⬇️


Amazing potential for #ProgrammableMaterials "#PhysicalProgramming of freeform folding..." #research #innovation bit.ly/1LJrhjT #fw

Traces, #Physicalprogramming of #freeform #folding in soft matter #programmablematter vimeo.com/133662815
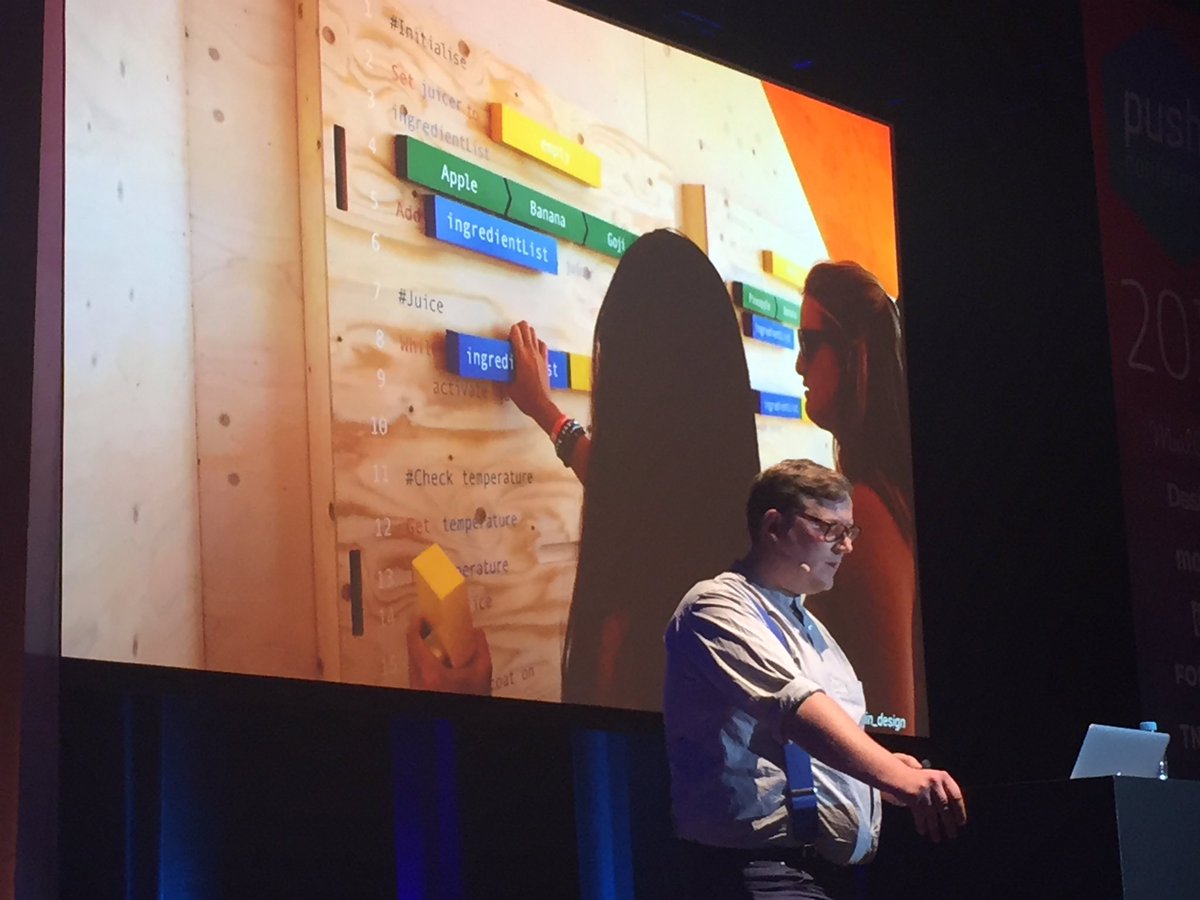
In physical programming, inputs and outputs are limited by the device; this forces pupils to work within the device’s means and to make careful choices over which inputs and outputs to use..." #physicalprogramming tes.com/sponsored/pi-t…

#Physicalprogramming to help teach coding principles to kids who can't see well, as well as those who can. Great to see this project I got to be part of making impact. #inclusivedesign codejumper.com Please share! youtube.com/watch?v=B2JzcW…
youtube.com
YouTube
Accessible Coding for Future Inventors: Code Jumper

Physical AI shifting from concept to core operations: robots with vision + touch control now handle dynamic warehouse workflows in real time. Link 🔗 aibusiness.com/automation/int… What task would you hand off to a “physical AI” today? #LaunchCodeLabs #automation #AI #innovation

Physically-based rendering of synthetic computer vision data. x.com/chrisoffner3d/…
Vladlen Koltun speaks of a "Quiet Revolution in Robotics" thanks to better simulations. The more accurately we can simulate the real world, the better our models trained on synthetic/simulated data will perform in it. For CV, the best simulation is physically based rendering.

this is exactly why we built cosmiclabs.io. hardware does weird beautiful things like this all the time and most dev tools pretend the physical layer doesn't exist. we need real-time visibility into what our hardware is actually doing, not what we think it should be…
cosmiclabs.io
Spades - Hardware Development Workspace
A modern workspace for hardware and embedded engineers.

Physikal AI développe une brique logicielle capable de connecter, orchestrer et interagir avec tout type de robot (terrestre, aérien, maritime) en langage naturel, indépendamment du constructeur. 🤖 Cliquez ici pour soutenir la startup 👉 hubs.li/Q03Q01fP0

Robots must be reliable and hold up for a long time in order to be useful in the real world. Congratulations to @physical_int on π*0.6, which achieves much faster and more reliable task execution—in hours-long autonomous deployments—via RL on past experiences! 🎉

Our model can now learn from its own experience with RL! Our new π*0.6 model can more than double throughput over a base model trained without RL, and can perform real-world tasks: making espresso drinks, folding diverse laundry, and assembling boxes. More in the thread below.

#PhysicalAI is where #AI leaves the screen and starts moving value in the real world. 🚍🛰️🛴🤖 From scooters, city buses, drones to robots; we are becoming the operating system that allows #machines coordinate, pay, and learn together.

Self-improvement loops are becoming the defining pattern of modern robotics. @physical_int π*0.6 isn’t just executing tasks, it’s collecting its own data, improving from real mistakes, and running for hours with predictable reliability. Once robots can learn continuously in the…
Our model can now learn from its own experience with RL! Our new π*0.6 model can more than double throughput over a base model trained without RL, and can perform real-world tasks: making espresso drinks, folding diverse laundry, and assembling boxes. More in the thread below.

An Operating System for the Physical World, Part 2 open.substack.com/pub/caseyp10/p…

🔈@SeanXZhan and I are excited to share PhysiOpt, a differentiable physics optimizer that improves the physical integrity of 3D generative model outputs, which we will present at SIGGRAPH Asia 2025 in collaboration with Evan Thompson, Kenney Ng, and Mina Konaković Luković.
Strong results, especially the throughput gains from closing the loop with real-world RL. The next question is how the policy manages drift, recovery, and stability over long horizons across those task families.

Very excited to finally share what I’ve been up to @physical_int for the past 6 months: developing advantage-conditioned VLAs! We are finally moving beyond imitating teleop data, and towards improving models with suboptimal deployment data using scalable real-world RL. 👇🧵


We developed RECAP @physical_int to apply RL and interventions to π0.6, achieving high success rates and throughput on several challenging tasks! Watching these policies operate successfully for hours gives an appreciation for what the method can do

had a glimpse of the @physical_int office last month and they are truly operating on another level their focus on being a research first company is clearly paying off excited for the future where I can just plug in an off-the-shelf robotic arm, hook it up to a pi model, and…

We just released results for our newest VLA from Physical Intelligence: π*0.6. This one is trained with RL, and it makes it quite a bit better: often doubles throughput, enables real-world tasks like folding real laundry and making espresso drinks at the office.

The mentality had to flip entirely. Applications will want to do arbitrary classical things. To let them do that, dynamic circuits aren't enough. We need programs. Full, Turing-complete classical programs that drive a quantum device like you'd drive any normal hardware.

Development platform/IDE for extremely low-level physical logic programming.

PhysWorld is a new robot learning framework that connects video generation with physical world modeling. By taking just one image and a task prompt, it generates a task-specific video and reconstructs a 3D scene with realistic physics. Then, using object-centric reinforcement…


How you can get started in Physical AI 👇 Link: appblueprint.substack.com/p/robots-witho…

Add structured output & you get tool use Add api's to physics in context & you get physical intelligence

Prototyped a visual programming language last night where you can step the program and inspect the values on the wires. Super handy for debugging.

Amazing potential for #ProgrammableMaterials "#PhysicalProgramming of freeform folding… bit.ly/1OGTOVP
Another superb day delivering our @bsp_london Brent Computing CPD & Networking SPRING course with @duck_star. Check out the 🧵 to see pics from our sessions on #CyberSecurity #AIinEducation and Whole School #PhysicalProgramming using @intelino Smart Train. ⬇️⬇️⬇️
Something went wrong.
Something went wrong.
United States Trends
- 1. #UFCQatar 37.4K posts
- 2. Harden 8,491 posts
- 3. Liverpool 167K posts
- 4. Mizzou 3,827 posts
- 5. Newcastle 38.4K posts
- 6. Rutgers 5,173 posts
- 7. Mateer 1,680 posts
- 8. Chris Paul 12.9K posts
- 9. Slot 116K posts
- 10. Luke Riley 2,165 posts
- 11. Horiguchi 4,052 posts
- 12. Waldo 3,948 posts
- 13. Harvey Barnes 2,564 posts
- 14. #Sooners 1,139 posts
- 15. Arbuckle N/A
- 16. Missouri 9,837 posts
- 17. Bo Walker N/A
- 18. Tagir 1,939 posts
- 19. #kufball N/A
- 20. Salsa Boy N/A