#robotsensingsystems search results

Are you having difficulty managing the impact force when your #robot collides with an object? A new T-RO paper by researchers @KyushuUniv_EN illustrates how to use a proximity sensor to perform impact reduction for a robot. ieeexplore.ieee.org/document/10171… #RobotSensingSystems

Researchers from @HUST_China describe and construct a novel variable stiffness spherical joint motor that enables dexterous motion and joint compliance in omni-directions. ieeexplore.ieee.org/document/10328… #RobotSensingSystems #SphericalMotor #VariableStiffnessActuator #Robots

In a recent T-RO paper, researchers from @UnivParisSaclay and @UPJV_Univ propose a novel method to efficiently build a 3D surface reconstruction with a multi-robot system: ieeexplore.ieee.org/document/10106… #multirobotsystems #RobotSensingSystems #robots

If you are trying to ensure that your neural network can guide your robot safely, you may want to check out this recent T-RO paper from researchers @MIT_CSAIL: ieeexplore.ieee.org/document/10077… #AutonomousVehicles #NeuralNetworks #RobotSensingSystems

Please check out this T-RO suvery paper on haptic feedback in #RoboticTeleoperation by researchers @cpacchierotti @dprattichizzo @CNRSinformatics @IITalk @unisiena @irisa_lab ieeexplore.ieee.org/document/10363… #RobotSensingSystems #HapticInterfaces #HumanoidRobot #MedicalRobots

In a recent T-RO paper, researchers from @tsiotrasP 's lab develop an algorithm for efficient online multi-query motion planning under uncertainty. ieeexplore.ieee.org/document/10404… #RobotSensingSystems #AerospaceElectronics #BeliefSpace

T-RO Special Collection #ImpactAwareRobotics is live! A special thank you to Abderrahmane Kheddar, @YanGuRobotics, @MichaelAPosa, @AleSaccon, and handling editor Paolo Robuffo Giordano for their tireless commitment. ieeexplore.ieee.org/xpl/topics.jsp… #LeggedRobots #RobotSensingSystems
Engineers @UCL and @UNLoficial describe a novel way to use a soft-tipped sensor to improve elasticity sensing to help #robots better estimate object properties in a recent T-RO paper. ieeexplore.ieee.org/document/10454… #RobotSensingSystems #ElasticitySensing #HapticSensor

If you are at IROS 2023, come check out a presentation describing results from a recent T-RO paper from researchers @VanderbiltU on shape sensing for continuum robotic systems at 9:42am. ieeexplore.ieee.org/document/10013… #RobotSensingSystems #Robots #Kinematics #HumanRobotCollaboration

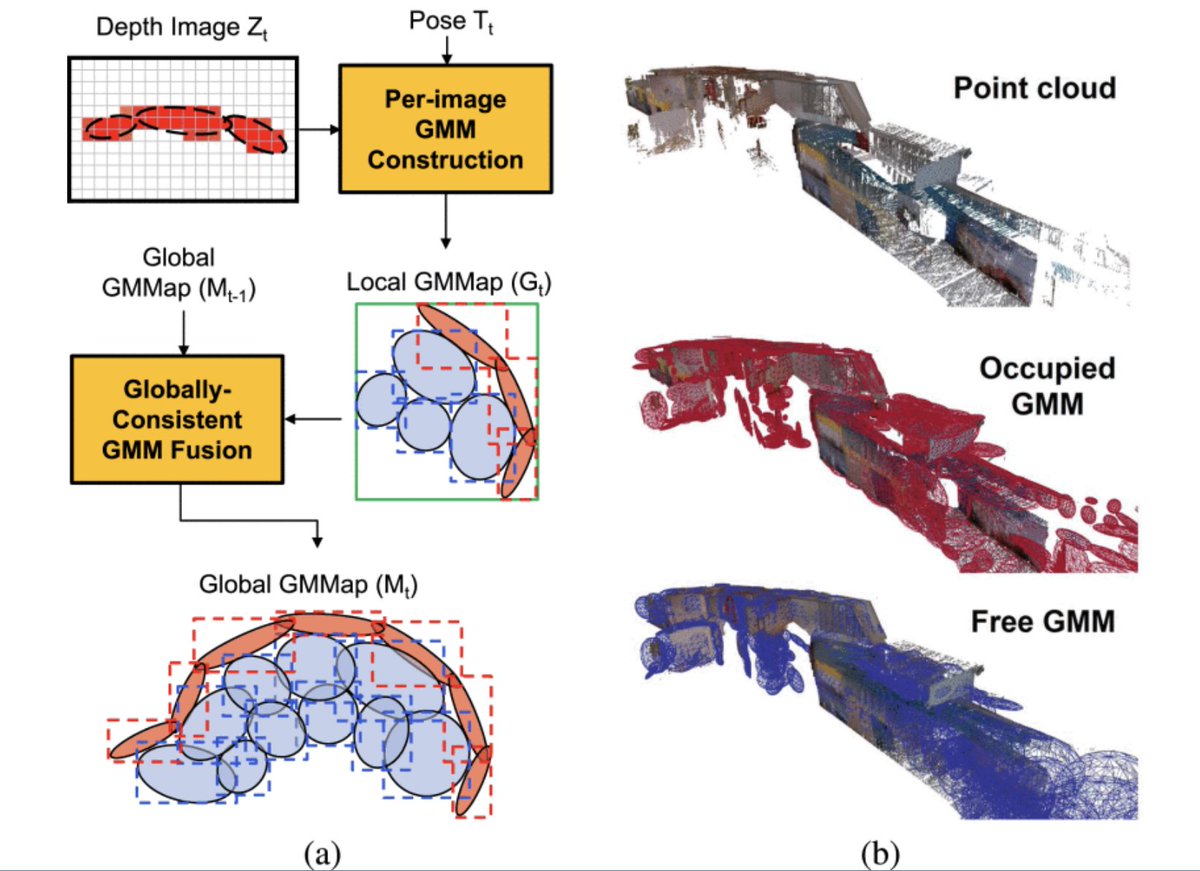
In a recent T-RO Researchers @SertacKaraman, @peterzxli, @eems_mit propose a memory-efficient continuous occupancy map that can be incrementally constructed from depth images using #Gaussian Mixture Models. ieeexplore.ieee.org/document/10379… #RobotSensingSystems #ComputationalModeling
Researchers from @UCSDJacobs, @ucsd_mae, @UCSBengineering, and @lirmm_ propose new vine robot designs based on the concept material scrunching that enables the miniaturization of such robots with working channels in a new T-RO paper. ieeexplore.ieee.org/document/10448… #RobotSensingSystems

In a recent T-RO paper, researchers from @KAISTCoE develop an algorithm to improve robot state estimation at dynamic contact events with an invariant smoother. ieeexplore.ieee.org/document/10301… #RobotSensingSystems #Robots #LeggedLocomotion #Kinematics

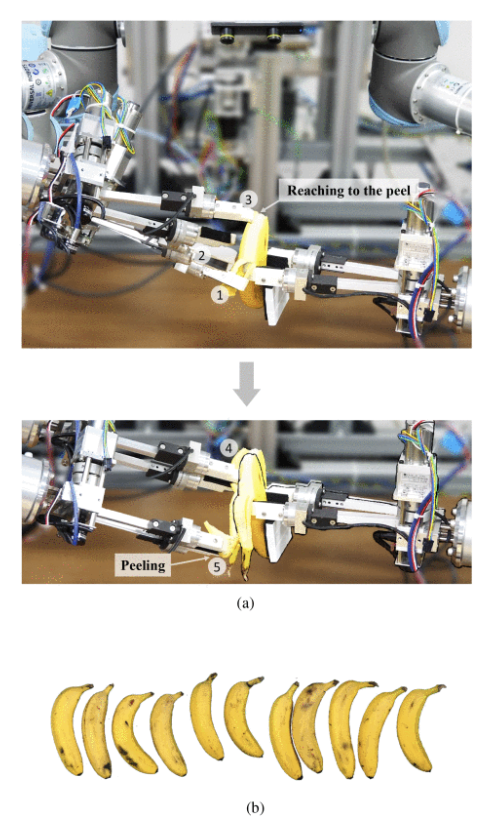
Researchers from @UTokyo_News_en describe how to improve the quality of imitation learning for long-horizon #DexterousRoboticManipulation of deformable objects in a recent T-RO paper ieeexplore.ieee.org/document/10458… #TaskAnalysis #RobotSensingSystems #NeuralNetworks #DeepLearningInRobots
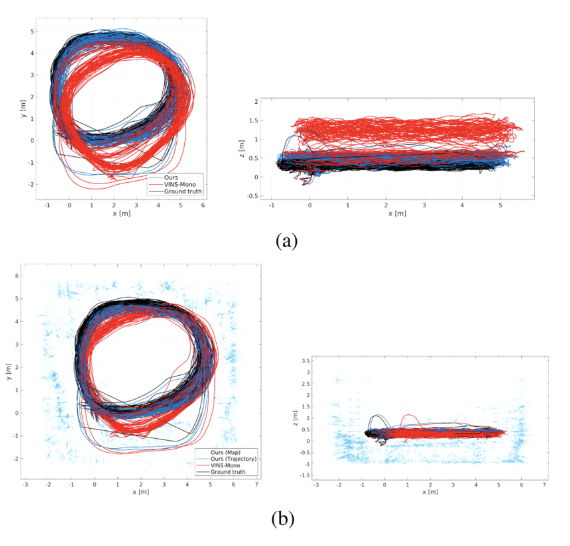
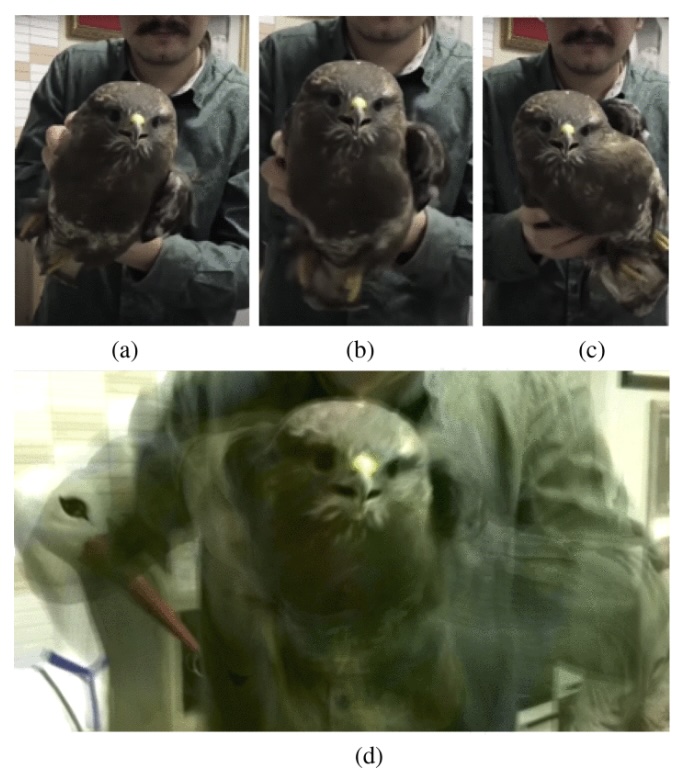
Researchers from @UDelaware describe a robust technique for visual-inertial #SLAM from monocular cameras. ieeexplore.ieee.org/document/10609… #SimultaneousLocalizationAndMapping #RobotSensingSystems #VisualInertial
In a recent T-RO paper, researchers from @UBuffalo and @UF describe a novel MEMS mirror to change the field of view of LiDAR independent of #robot motion which they show can drastically simplify #robotperception ieeexplore.ieee.org/document/10453… #RobotSensingSystems #RobotVisionSystems
A recent T-RO paper from researchers @Harvard and @EPrinceton describes a framework for resilient hypothesis testing in the presence of malicious robots. ieeexplore.ieee.org/document/10559… #RobotKinematics #RobotSensingSystems #MaliciousRobots #MultiRobotSystems #NetworkedRobots

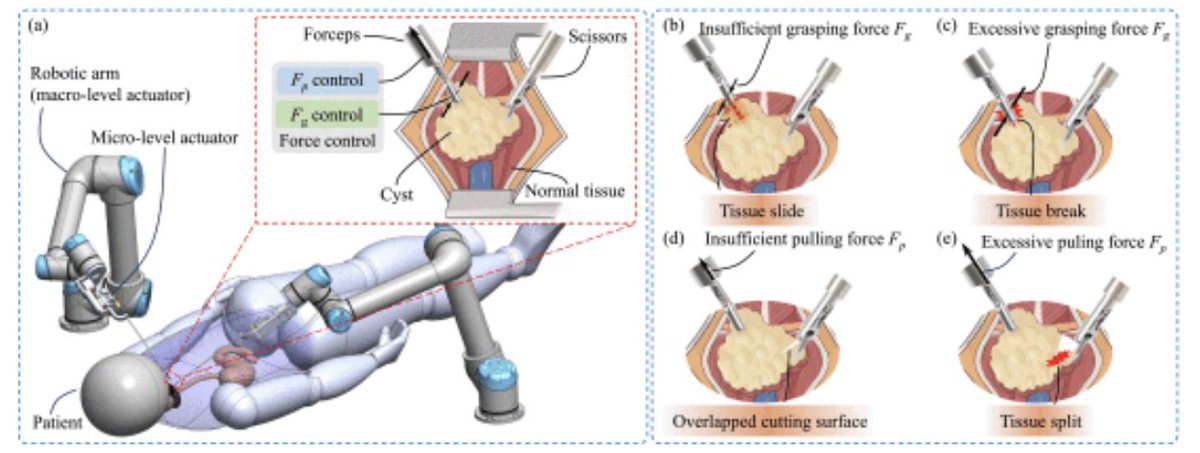
Utilizing innovative miniature sensorized forceps, a recent T-RO paper introduces a novel method to control multiple forces and automate tissue traction. ieeexplore.ieee.org/document/10734… #SurgicalRobots #AutomaticTissueTraction #RobotSensingSystems #MinimallyInvasiveSurgery @UNSW
Researchers from @CSIRORobotics @CSIRO develop fibre jammed tendons with tunable mechanical properties that can be 3D printed. They show these tendons for shock absorbance and maintaining joint stability ieeexplore.ieee.org/stamp/stamp.js… #RobotSensingSystems #LeggedRobotics #SoftRobotics

Utilizing innovative miniature sensorized forceps, a recent T-RO paper introduces a novel method to control multiple forces and automate tissue traction. ieeexplore.ieee.org/document/10734… #SurgicalRobots #AutomaticTissueTraction #RobotSensingSystems #MinimallyInvasiveSurgery @UNSW
T-RO Special Collection #ImpactAwareRobotics is live! A special thank you to Abderrahmane Kheddar, @YanGuRobotics, @MichaelAPosa, @AleSaccon, and handling editor Paolo Robuffo Giordano for their tireless commitment. ieeexplore.ieee.org/xpl/topics.jsp… #LeggedRobots #RobotSensingSystems
Researchers from @CSIRORobotics @CSIRO develop fibre jammed tendons with tunable mechanical properties that can be 3D printed. They show these tendons for shock absorbance and maintaining joint stability ieeexplore.ieee.org/stamp/stamp.js… #RobotSensingSystems #LeggedRobotics #SoftRobotics
Researchers from @UDelaware describe a robust technique for visual-inertial #SLAM from monocular cameras. ieeexplore.ieee.org/document/10609… #SimultaneousLocalizationAndMapping #RobotSensingSystems #VisualInertial
A recent T-RO paper from researchers @Harvard and @EPrinceton describes a framework for resilient hypothesis testing in the presence of malicious robots. ieeexplore.ieee.org/document/10559… #RobotKinematics #RobotSensingSystems #MaliciousRobots #MultiRobotSystems #NetworkedRobots
Researchers from @UTokyo_News_en describe how to improve the quality of imitation learning for long-horizon #DexterousRoboticManipulation of deformable objects in a recent T-RO paper ieeexplore.ieee.org/document/10458… #TaskAnalysis #RobotSensingSystems #NeuralNetworks #DeepLearningInRobots
Engineers @UCL and @UNLoficial describe a novel way to use a soft-tipped sensor to improve elasticity sensing to help #robots better estimate object properties in a recent T-RO paper. ieeexplore.ieee.org/document/10454… #RobotSensingSystems #ElasticitySensing #HapticSensor
In a recent T-RO paper, researchers from @UBuffalo and @UF describe a novel MEMS mirror to change the field of view of LiDAR independent of #robot motion which they show can drastically simplify #robotperception ieeexplore.ieee.org/document/10453… #RobotSensingSystems #RobotVisionSystems
Researchers from @UCSDJacobs, @ucsd_mae, @UCSBengineering, and @lirmm_ propose new vine robot designs based on the concept material scrunching that enables the miniaturization of such robots with working channels in a new T-RO paper. ieeexplore.ieee.org/document/10448… #RobotSensingSystems
In a recent T-RO paper, researchers from @tsiotrasP 's lab develop an algorithm for efficient online multi-query motion planning under uncertainty. ieeexplore.ieee.org/document/10404… #RobotSensingSystems #AerospaceElectronics #BeliefSpace
In a recent T-RO Researchers @SertacKaraman, @peterzxli, @eems_mit propose a memory-efficient continuous occupancy map that can be incrementally constructed from depth images using #Gaussian Mixture Models. ieeexplore.ieee.org/document/10379… #RobotSensingSystems #ComputationalModeling
Please check out this T-RO suvery paper on haptic feedback in #RoboticTeleoperation by researchers @cpacchierotti @dprattichizzo @CNRSinformatics @IITalk @unisiena @irisa_lab ieeexplore.ieee.org/document/10363… #RobotSensingSystems #HapticInterfaces #HumanoidRobot #MedicalRobots
Researchers from @HUST_China describe and construct a novel variable stiffness spherical joint motor that enables dexterous motion and joint compliance in omni-directions. ieeexplore.ieee.org/document/10328… #RobotSensingSystems #SphericalMotor #VariableStiffnessActuator #Robots
In a recent T-RO paper, researchers from @KAISTCoE develop an algorithm to improve robot state estimation at dynamic contact events with an invariant smoother. ieeexplore.ieee.org/document/10301… #RobotSensingSystems #Robots #LeggedLocomotion #Kinematics
If you are at IROS 2023, come check out a presentation describing results from a recent T-RO paper from researchers @VanderbiltU on shape sensing for continuum robotic systems at 9:42am. ieeexplore.ieee.org/document/10013… #RobotSensingSystems #Robots #Kinematics #HumanRobotCollaboration
In a recent T-RO paper, researchers from @UnivParisSaclay and @UPJV_Univ propose a novel method to efficiently build a 3D surface reconstruction with a multi-robot system: ieeexplore.ieee.org/document/10106… #multirobotsystems #RobotSensingSystems #robots
Are you having difficulty managing the impact force when your #robot collides with an object? A new T-RO paper by researchers @KyushuUniv_EN illustrates how to use a proximity sensor to perform impact reduction for a robot. ieeexplore.ieee.org/document/10171… #RobotSensingSystems
Please check out this T-RO suvery paper on haptic feedback in #RoboticTeleoperation by researchers @cpacchierotti @dprattichizzo @CNRSinformatics @IITalk @unisiena @irisa_lab ieeexplore.ieee.org/document/10363… #RobotSensingSystems #HapticInterfaces #HumanoidRobot #MedicalRobots
Researchers from @HUST_China describe and construct a novel variable stiffness spherical joint motor that enables dexterous motion and joint compliance in omni-directions. ieeexplore.ieee.org/document/10328… #RobotSensingSystems #SphericalMotor #VariableStiffnessActuator #Robots
Engineers @UCL and @UNLoficial describe a novel way to use a soft-tipped sensor to improve elasticity sensing to help #robots better estimate object properties in a recent T-RO paper. ieeexplore.ieee.org/document/10454… #RobotSensingSystems #ElasticitySensing #HapticSensor
In a recent T-RO paper, researchers from @tsiotrasP 's lab develop an algorithm for efficient online multi-query motion planning under uncertainty. ieeexplore.ieee.org/document/10404… #RobotSensingSystems #AerospaceElectronics #BeliefSpace
In a recent T-RO Researchers @SertacKaraman, @peterzxli, @eems_mit propose a memory-efficient continuous occupancy map that can be incrementally constructed from depth images using #Gaussian Mixture Models. ieeexplore.ieee.org/document/10379… #RobotSensingSystems #ComputationalModeling
Ever wonder how we can get a robot to mimic human motion? Check out this recent survey paper on mapping human hand motions to robotic hands by researchers from @Unibo and @la_UPC : ieeexplore.ieee.org/document/98969… #RobotHand #Kinematics #RobotSensingSystems

If you are trying to ensure that your neural network can guide your robot safely, you may want to check out this recent T-RO paper from researchers @MIT_CSAIL: ieeexplore.ieee.org/document/10077… #AutonomousVehicles #NeuralNetworks #RobotSensingSystems
If you are at IROS 2023, come check out a presentation describing results from a recent T-RO paper from researchers @VanderbiltU on shape sensing for continuum robotic systems at 9:42am. ieeexplore.ieee.org/document/10013… #RobotSensingSystems #Robots #Kinematics #HumanRobotCollaboration
In a recent T-RO paper, researchers from @KAISTCoE develop an algorithm to improve robot state estimation at dynamic contact events with an invariant smoother. ieeexplore.ieee.org/document/10301… #RobotSensingSystems #Robots #LeggedLocomotion #Kinematics
Researchers from @UTokyo_News_en describe how to improve the quality of imitation learning for long-horizon #DexterousRoboticManipulation of deformable objects in a recent T-RO paper ieeexplore.ieee.org/document/10458… #TaskAnalysis #RobotSensingSystems #NeuralNetworks #DeepLearningInRobots
In a recent T-RO paper, researchers from @UBuffalo and @UF describe a novel MEMS mirror to change the field of view of LiDAR independent of #robot motion which they show can drastically simplify #robotperception ieeexplore.ieee.org/document/10453… #RobotSensingSystems #RobotVisionSystems
Researchers from @UCSDJacobs, @ucsd_mae, @UCSBengineering, and @lirmm_ propose new vine robot designs based on the concept material scrunching that enables the miniaturization of such robots with working channels in a new T-RO paper. ieeexplore.ieee.org/document/10448… #RobotSensingSystems
A recent T-RO paper from researchers @Harvard and @EPrinceton describes a framework for resilient hypothesis testing in the presence of malicious robots. ieeexplore.ieee.org/document/10559… #RobotKinematics #RobotSensingSystems #MaliciousRobots #MultiRobotSystems #NetworkedRobots
Utilizing innovative miniature sensorized forceps, a recent T-RO paper introduces a novel method to control multiple forces and automate tissue traction. ieeexplore.ieee.org/document/10734… #SurgicalRobots #AutomaticTissueTraction #RobotSensingSystems #MinimallyInvasiveSurgery @UNSW
Researchers from @CSIRORobotics @CSIRO develop fibre jammed tendons with tunable mechanical properties that can be 3D printed. They show these tendons for shock absorbance and maintaining joint stability ieeexplore.ieee.org/stamp/stamp.js… #RobotSensingSystems #LeggedRobotics #SoftRobotics
Researchers from @UDelaware describe a robust technique for visual-inertial #SLAM from monocular cameras. ieeexplore.ieee.org/document/10609… #SimultaneousLocalizationAndMapping #RobotSensingSystems #VisualInertial
Something went wrong.
Something went wrong.
United States Trends
- 1. Good Thursday 27K posts
- 2. Happy Friday Eve N/A
- 3. #thursdayvibes 2,095 posts
- 4. ESPN Bet N/A
- 5. #thursdaymotivation 1,298 posts
- 6. #ThursdayThoughts 1,320 posts
- 7. #Talus_Labs N/A
- 8. Lakers 85K posts
- 9. #PutThatInYourPipe N/A
- 10. Wemby 28.6K posts
- 11. Vatican 10.6K posts
- 12. Grapefruit 1,500 posts
- 13. Unplanned 6,291 posts
- 14. Marcus Smart 6,916 posts
- 15. Captain Kangaroo 1,271 posts
- 16. Blazers 9,911 posts
- 17. Russ 12.1K posts
- 18. Richard 45.5K posts
- 19. Shroud 5,790 posts
- 20. Shabbat 7,322 posts