#rtabmap ผลการค้นหา




Exploring my simulated Moon (github.com/mgonzs13/ros2_…) with #Nav2, #RTABMap, and a YASMIN (github.com/uleroboticsgro…) state machine. #ROS2 #Gazebo

Getting closer to have #rtabmap working on Slammer with a little GPU help from @NVIDIAEmbedded Jetson Nano @rosorg @OpenRoboticsOrg @introlab @IntelRealSense @pizzarobotics



New gift 🎁 for #Panther. Now I can improve autonomous navigation & mapping. The new test is #rtabmap @introlab @OSRFoundation @stereolabs3D


Erwhi demo for @MakerFaireRome is ready!!! Come to Officine Robotiche 9-A24! @UPbridge_gap @AAEONEurope @IntelRealSense @IntelMovidius @OpenRoboticsOrg @rosorg @_TheConstruct_ @AWSOpen @OfficineRobotic #slam #rtabmap #goros #openvino #realsense #erwhi #robomaker






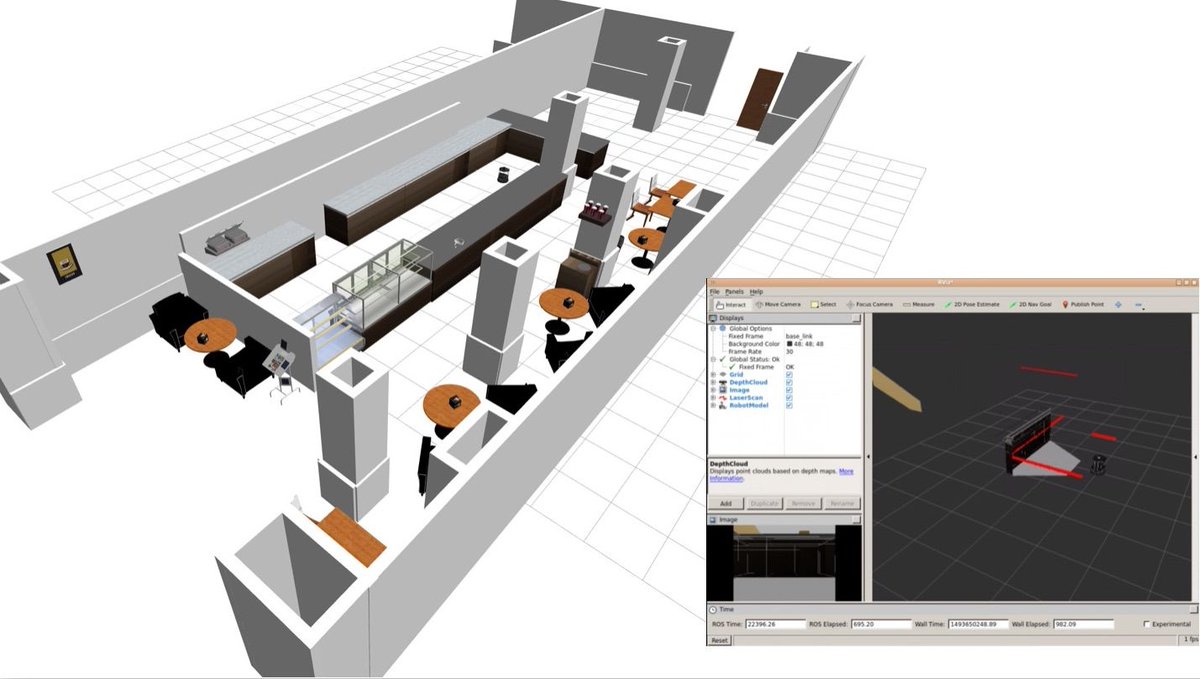
Para realizar el mapeado 3D se emplea el paquete de #ROS #RTABMap, que empleando técnicas #SLAM fusiona los datos de la #odometria del robot, la #camara RGB-D y el #lidar.


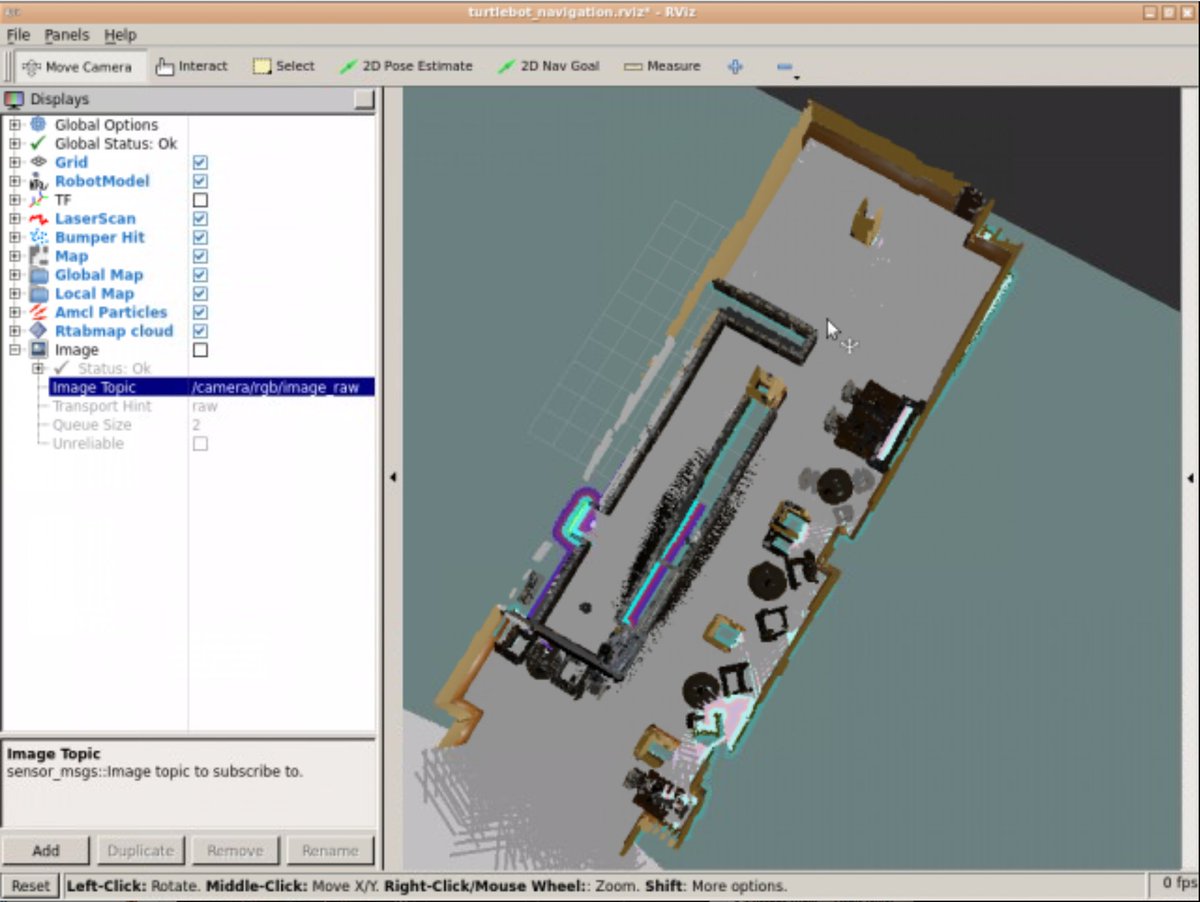
The following is a brief high level overview of a project I have been working on up until recently, to explore the challenges associated with integrating an existing ground vehicle with the ROS ecosystem. antoan.github.io/Nemesis/ #rtabmap #ROS #D435i #T265 #Husky #clearpathrobots

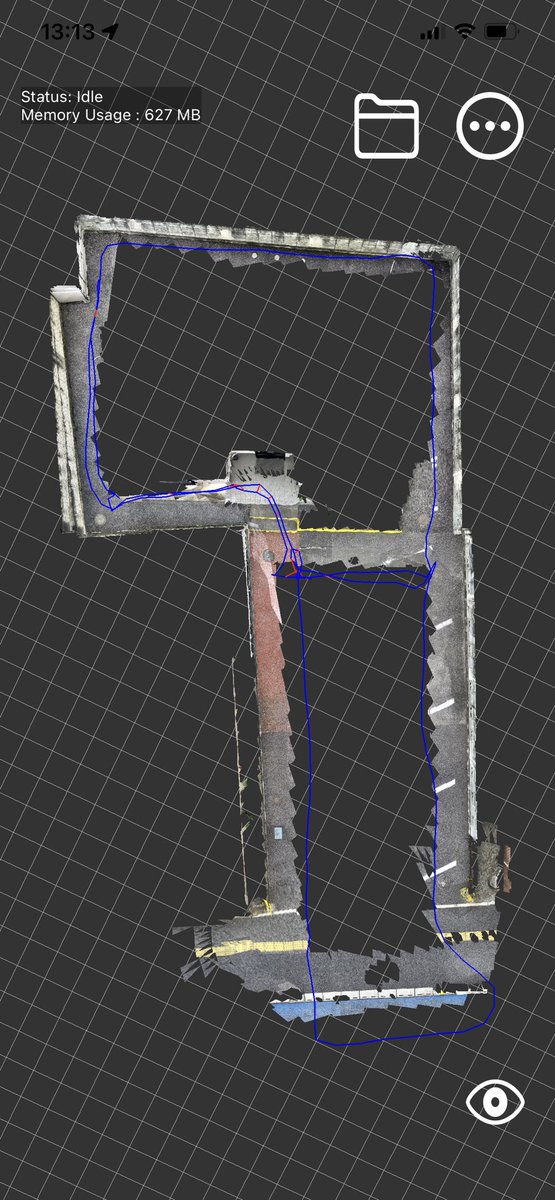
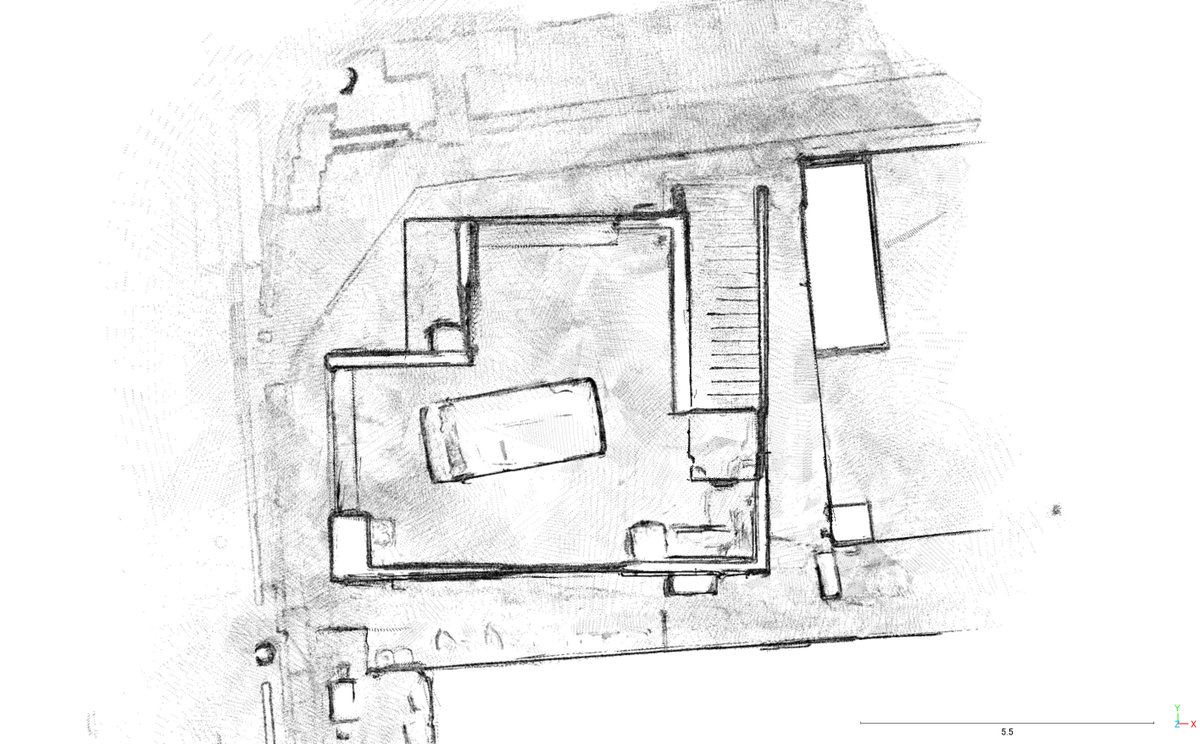
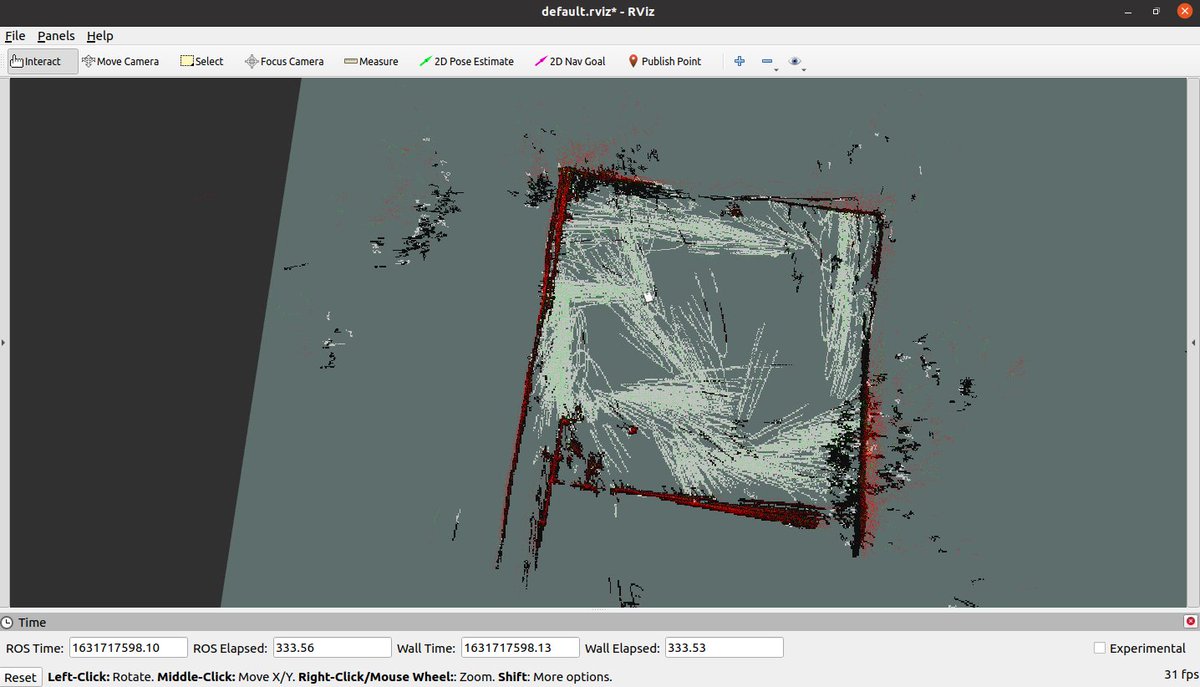
Eliminating drift with incremental loop closure. Would it be an overstatement to call it the Holy Grail of iPhone 3d scanning? In any case, #RTABmap handles it quite well... in real time.






Elevate your #Mapping skills with Real-Time Appearance-Based Mapping (#RTABMap) - an RGB-D SLAM method powered by loop closure detection. 👨💻➡️ ow.ly/RFER50PALbj Acquire mastery of the #rtabmap_ros toolkit via this hands-on course!
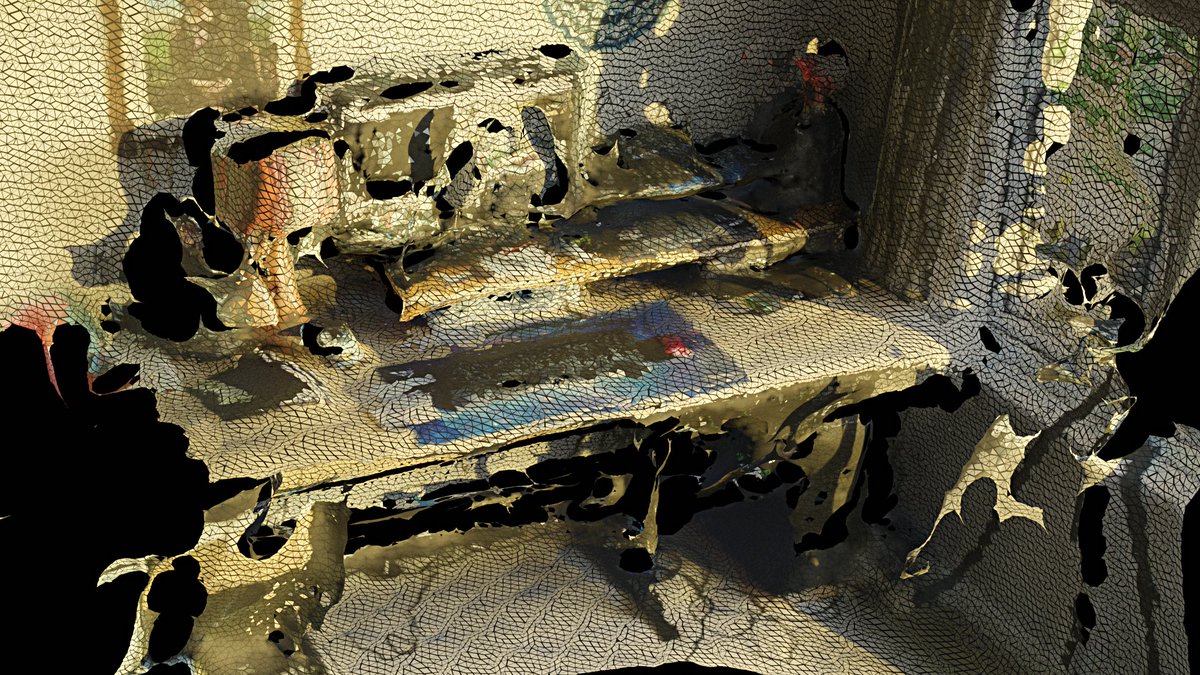
Trying out yet another scanning app: #RTABmap. There's a ton of settings which I haven't figured out yet, but first attempts look promising. #1scanaday @Sketchfab 👉 skfb.ly/ooyCX

Finally got real-time 3D visual SLAM working on a simulated quadcopter. Not sure it has practical use on its own besides for making neat models. #ROS2 #visualSLAM #RTABMAP #Gazebo #UAS
Exploring my simulated Moon (github.com/mgonzs13/ros2_…) with #Nav2, #RTABMap, and a YASMIN (github.com/uleroboticsgro…) state machine. #ROS2 #Gazebo
iPhone15Pro にして #RTABMAP とか動作が重くなりがちなアプリも安定して使えてる気がします。12Pro の時は頻繁に落ちてたので。
知る限り携帯端末のみで閉合処理が可能なのは、 #Scaniverse のDetail Mode #RTABmap #Dot3D です。 (#RealityScan 等のクラウド処理前提のアプリは別ジャンルということで) その他、ARkitの仕様を利用した以下の方法なら、他のアプリでも簡易的に閉合処理が可能です。 x.com/Exclude_me_/st…
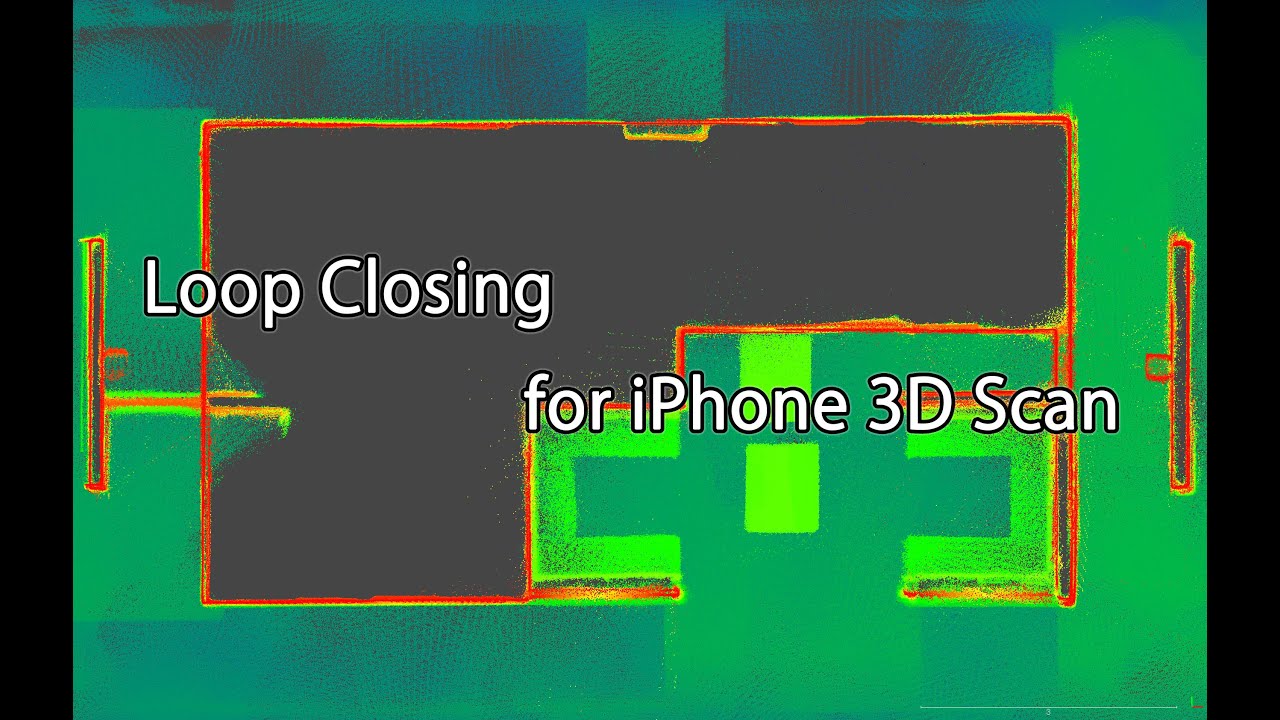
#iPhoneLiDAR Scan tips for getting a loop-closed scan model. I think this method is useful for apps that use ARkit. スキャン時に、 Loop-closingしたスキャンモデルを取得する方法を動画で公開しました。 ARkitを用いたアプリであれば有効な方法だと思います。 youtu.be/-iPBNbJr9tU
youtube.com
YouTube
Loop Closing for iPhone 3D Scan
Elevate your #Mapping skills with Real-Time Appearance-Based Mapping (#RTABMap) - an RGB-D SLAM method powered by loop closure detection. 👨💻➡️ ow.ly/RFER50PALbj Acquire mastery of the #rtabmap_ros toolkit via this hands-on course!
Discover how to navigate through the fusion of the move_base node with #RTABMap (Real-Time Appearance-Based Mapping). Full video ➡️ ow.ly/N1J350PAsRF #Navigation #robotics #autonomous

#RTABMAP is still the most useful #3dscanning data capture framework.
Reveal time: A. #RTABmap B. @EveryPointIO C. @Polycam3D
Para realizar el mapeado 3D se emplea el paquete de #ROS #RTABMap, que empleando técnicas #SLAM fusiona los datos de la #odometria del robot, la #camara RGB-D y el #lidar.
The following is a brief high level overview of a project I have been working on up until recently, to explore the challenges associated with integrating an existing ground vehicle with the ROS ecosystem. antoan.github.io/Nemesis/ #rtabmap #ROS #D435i #T265 #Husky #clearpathrobots

For anyone who is planning to work or currently working with Ubuntu 18.04 LTS on Raspberry Pi 4 and RealSenseD435. Some guidance on installing RTAB-Map is also included in the article. #raspberrypi4 #realsensed435 #rtabmap #ROS shalutharajapakshe.medium.com/installing-ubu…
shalutharajapakshe.medium.com
Installing Ubuntu(18.04 LTS) on Raspberry Pi 4 with ROS Melodic and RealSense D435 + RTAB-Map
I thought of writing this article because I had to face a lot of problems when configuring the Intel RealSense D435 camera to work in a ROS…
To wrap up, a shout-out to the creators of the fantastic scanning apps. Check them out! @3dScannerApp_ @EveryPointIO @Metascan3D @Polycam3D #RTABmap @Scaniverse @SiteScapeAI @TRNIO

Great job @Astroshots 🚀 @OpenRoboticsOrg @rosorg #ZED2i #Jetson #RTABMAP #SLAM #stereovision #Robotics #GoROS
Livox and ZED2i fused map. Rtabmap_ros. Everything lines up nicely now. @Stereolabs3D @NVIDIAEmbedded
New gift 🎁 for #Panther. Now I can improve autonomous navigation & mapping. The new test is #rtabmap @introlab @OSRFoundation @stereolabs3D
Erwhi demo for @MakerFaireRome is ready!!! Come to Officine Robotiche 9-A24! @UPbridge_gap @AAEONEurope @IntelRealSense @IntelMovidius @OpenRoboticsOrg @rosorg @_TheConstruct_ @AWSOpen @OfficineRobotic #slam #rtabmap #goros #openvino #realsense #erwhi #robomaker
Getting closer to have #rtabmap working on Slammer with a little GPU help from @NVIDIAEmbedded Jetson Nano @rosorg @OpenRoboticsOrg @introlab @IntelRealSense @pizzarobotics
Para realizar el mapeado 3D se emplea el paquete de #ROS #RTABMap, que empleando técnicas #SLAM fusiona los datos de la #odometria del robot, la #camara RGB-D y el #lidar.

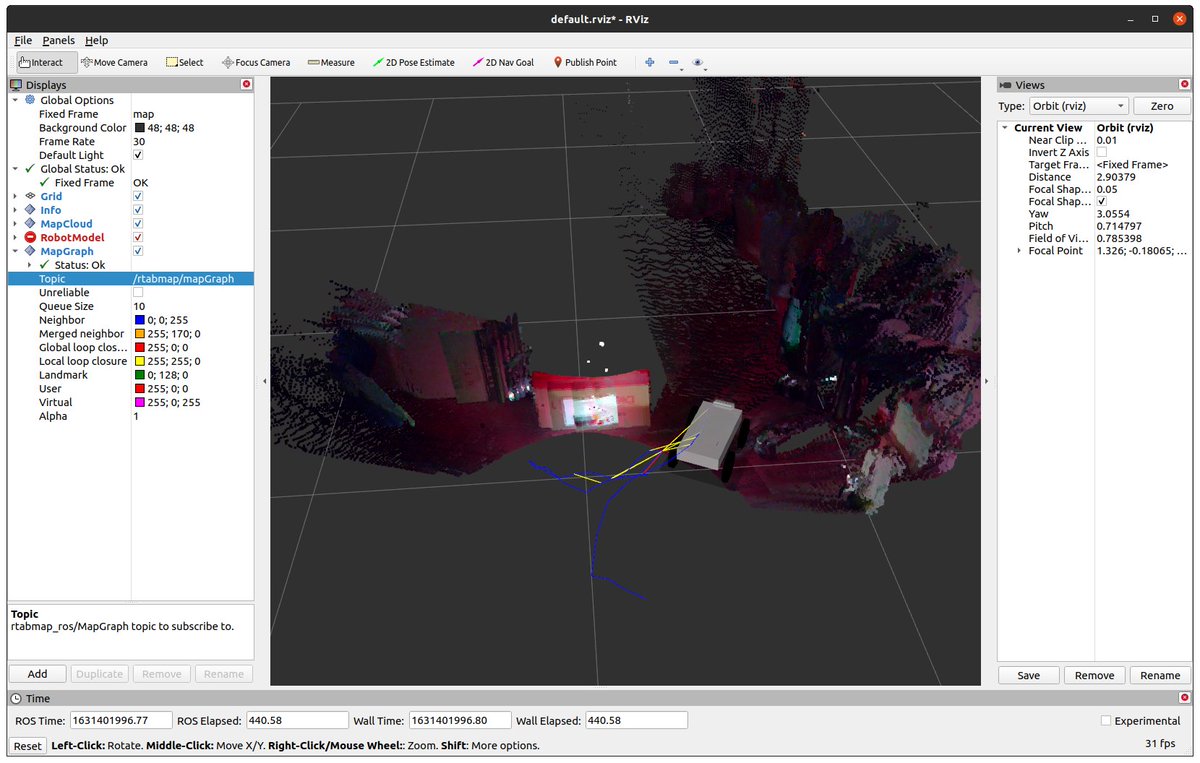
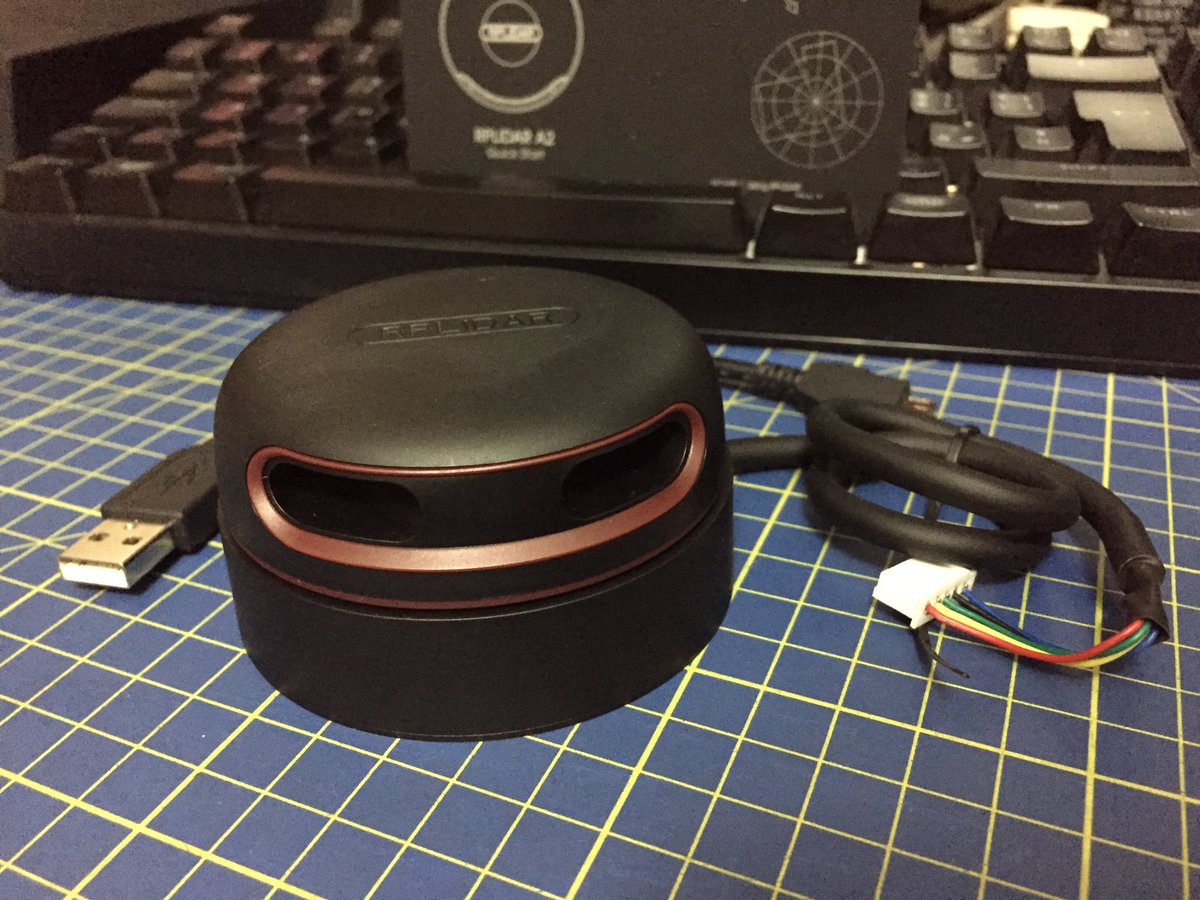
Visual SLAM on AGV with sensor fusion of pointcloud from Realsense D435 and Rplidar A208. Video: lnkd.in/gVJPssZ Code: lnkd.in/gcVzvAW #ros #slam #rtabmap #realsense #lidar #mapping #agv #pointcloud @OpenRoboticsOrg @rosorg

Elevate your #Mapping skills with Real-Time Appearance-Based Mapping (#RTABMap) - an RGB-D SLAM method powered by loop closure detection. 👨💻➡️ ow.ly/RFER50PALbj Acquire mastery of the #rtabmap_ros toolkit via this hands-on course!
Small "self isolation" project: setting up @GazeboSim simulation on my rover robot, github.com/AlessioMorale/… Lidar, rgbd camera and ros_control stack are working. Still some small things to fix then I'll try running #rtabmap and navigation @rosorg @OpenRoboticsOrg

The following is a brief high level overview of a project I have been working on up until recently, to explore the challenges associated with integrating an existing ground vehicle with the ROS ecosystem. antoan.github.io/Nemesis/ #rtabmap #ROS #D435i #T265 #Husky #clearpathrobots
Something went wrong.
Something went wrong.
United States Trends
- 1. #TT_Telegram_sam11adel N/A
- 2. #hazbinhotelseason2 52.9K posts
- 3. LeBron 85.9K posts
- 4. #hazbinhotelspoilers 2,995 posts
- 5. #DWTS 54.3K posts
- 6. Peggy 19.7K posts
- 7. #InternationalMensDay 23.5K posts
- 8. Reaves 8,874 posts
- 9. Patrick Stump N/A
- 10. Whitney 16.3K posts
- 11. Kwara 172K posts
- 12. Grayson 7,146 posts
- 13. Dearborn 238K posts
- 14. DUSD N/A
- 15. Jazz 27.7K posts
- 16. Orioles 7,265 posts
- 17. Celebrini 5,236 posts
- 18. ELAINE 17.5K posts
- 19. Tatum 17.2K posts
- 20. Haiti 72.2K posts