
你可能会喜欢















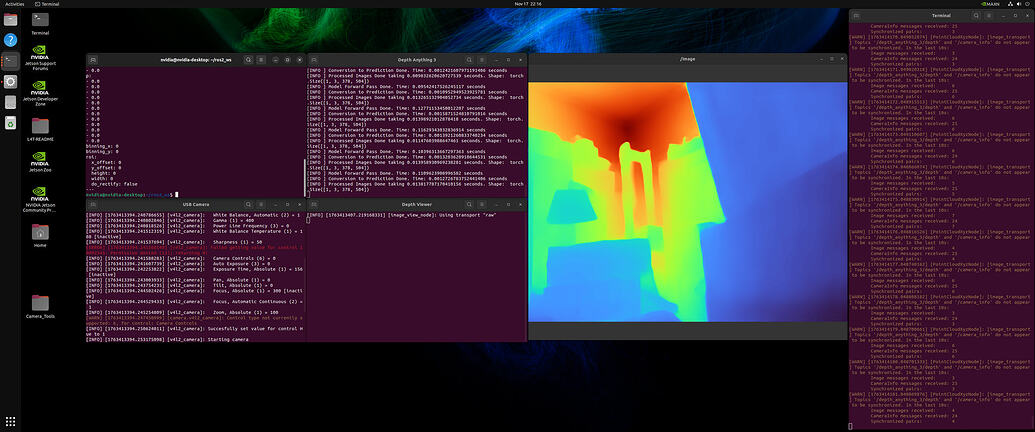
Here is your ROS and open source robotics news for the week of November 17th: 🦃ROS 2 Package for Depth Anything 3 🦃@NASA releases OGMA 1.0: C99 real time code for ROS 2 🦃@roboticseabass releases RoboPlan motion planning library 🦃Full Easy Nav introduction workshop ⬇️⬇️⬇️
In case you missed it, here is our monthly @GazeboSim community meeting for November. Our guest speaker outlined the process of updating Project Dave to modern Gazebo and accelerating the performance of a sonar simulation using CUDA. vimeo.com/1140873566?sha…

vimeo.com
Vimeo
Gazebo Community Meeting -- 2025-11-26 -- Updating Project DAVE and...

lwrclpy-for-FastDDSv3 github.com/tatsuyai713/lw… An rclpy-compatible Python library built directly on Fast DDS v3—designed to solve the friction of using ROS 2 with Python ML/AI libraries.

python_simple_mppi has reached 512 GitHub stars⭐️ Thank you to all the stargazers!💫 github.com/MizuhoAOKI/pyt…

🧠Model-Based RL shows promises but has seen limited success in real-world robotics. 🌎Introducing Robotic World Model, a black-box end-to-end neural dynamics model that bridges this gap, where policies are trained purely in imagination. @NeurIPSConf 🎯sites.google.com/view/roboticwo…
ROS 2 アドカレに登録する記事だけど、こらえ性がないので先んじて公開しちゃいます。。。 ROS 2 Rustクライアント実装状況 2025/11/27 現在 qiita.com/MrBearing/item…

If you use ROS 2 and use RVL encoded compressedDepth image, I published a new plugin as a schema convertor for foxglove visualization! You can install it on Extensions in Foxglove directly. github.com/makeecat/foxgl… #foxglove #ros2 #robotics #visualization

🚀 Excited to attend my first #NeurIPS2025 and present our lighting-aware SLAM method, NFL-BA! 🔗 asdunnbe.github.io/NFL-BA/ 🔦 Why this matters: Traditional Bundle Adjustment (BA) in SLAM assumes static lighting, but many real scenarios—endoscopy, search & rescue, subterranean…

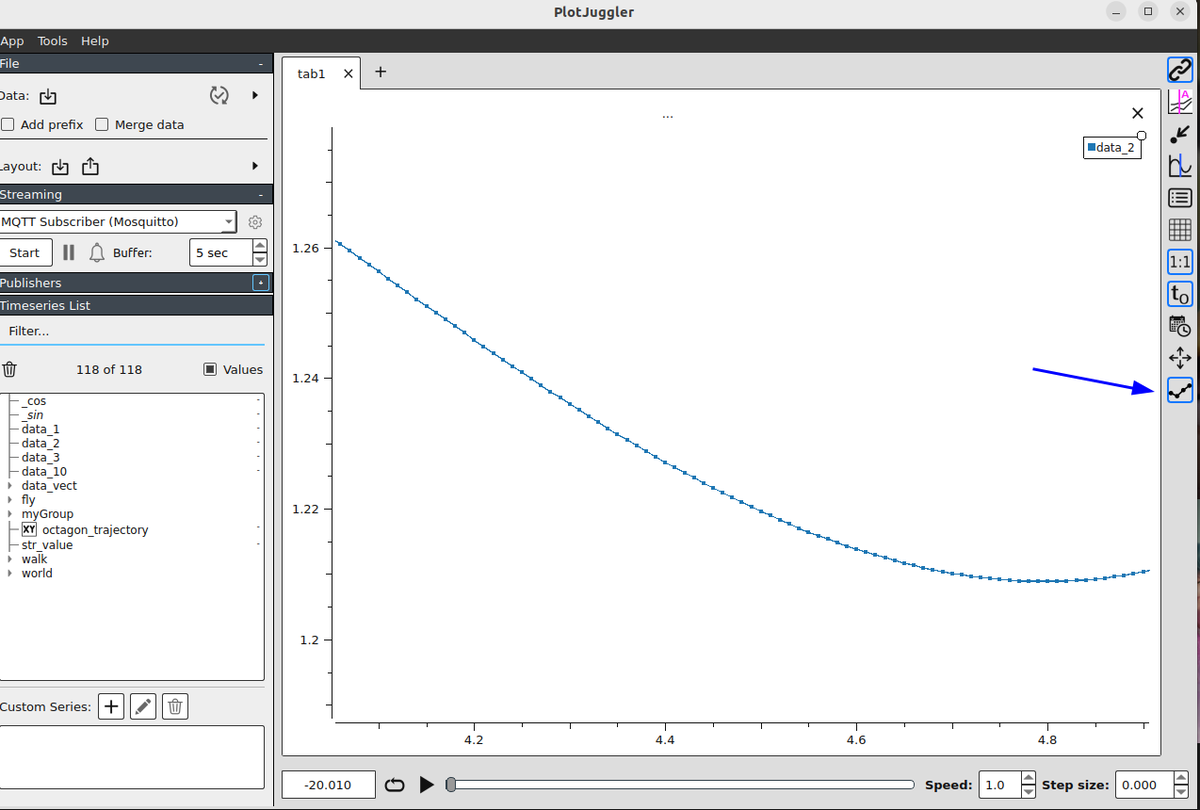
#PlotJuggler 3.14.1 released with a useful toggle in the UI to quickly switch between "lines only" to "lines+points". Available as Ubuntu snap, or as AppImage / Debian / Windows installer: github.com/facontidavide/…
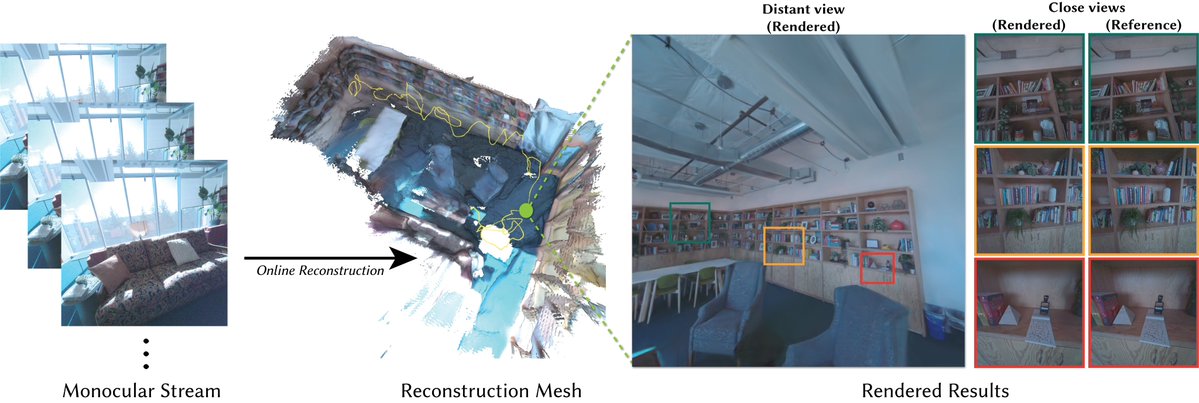
Online-3DGS-Monocular Monocular Online Reconstruction with Enhanced Detail Preservation github.com/facebookresear…
🚀Rovium IDE v0.7.0 (beta) released! ✨Support remote and devcontainer workspace. ✨Integrate docker extension. 📣So, do you use Docker for #ROS development?

🏆 The registration deadline for the fourth 𝐑𝐨𝐛𝐨𝐑𝐚𝐜𝐞𝐫 𝗦𝗶𝗺 𝗥𝗮𝗰𝗶𝗻𝗴 𝗟𝗲𝗮𝗴𝘂𝗲 has been extended till November 28, 2025! 🌐 autodrive-ecosystem.github.io/competitions/r… @autodrive_ai @RoboRacerAi @AutowareFdn @OpenRoboticsOrg @IEEEorg @ieeeras @CSSIEEE @IEEECDC2025 @Techfest_IITB


Hypothetically, if I were to organize a robot hacking village at @BSidesSF which local startups would loan me a robot? @PolymathRobots, @foxglove, @LocusRobotics, @bearrobotics, @multiplylabs, @FANUCAmerica, @IntrinsicAI, @opencvlive, @PX4Autopilot, @UnitreeRobotics??
We just released 30 new and 654 updated packages for ROS 2 Humble Hawksbill. New packages include: 🐢 nav2-route 🐢 ouster-ros 🐢 pal-sea-arm: 🐢 play-motion2-cli 🐢 replay-testing 🐢 rosbag2rawlog 🐢 synchros2 🐢 tiago-pro Full details on Discourse: discourse.openrobotics.org/t/new-packages…


ROS Japan UG #60 ROSConふり返り+IREXキャッチアップ会 に参加を申し込みました! rosjp.connpass.com/event/376159/?… #rosjp


Join our Robotics Office Hours with the @huggingface LeRobot team on Wednesday, November 26 @ 11 AM PT. 🤖 Learn to post-train and evaluate Isaac GR00T N1.5 with the latest LeRobot release and see real-world deployment examples. 📆 Add to Calendar: nvda.ws/48cYeE0


New release 4.0.0 of YASMIN is out for #ROS2 Humble, Jazzy, Kilted and Rolling with a new documentation page 🥳🥳🥳 uleroboticsgroup.github.io/yasmin/4.0.0/
We're all set up for the @svrobo / @circuitlaunch Robot Block Party. Come get BBQ, watch robot boxing, and get some ROS stickers!




























































































United States 趋势
- 1. Panthers 43K posts
- 2. Rams 29.3K posts
- 3. Colts 30.4K posts
- 4. Falcons 12.7K posts
- 5. Jets 36.3K posts
- 6. Ole Miss 93.4K posts
- 7. Browns 41.8K posts
- 8. #KeepPounding 8,023 posts
- 9. Texans 22.5K posts
- 10. Stafford 18.6K posts
- 11. Bryce Young 10.2K posts
- 12. Brosmer 4,675 posts
- 13. Dallas Turner N/A
- 14. 49ers 22.6K posts
- 15. Lane Kiffin 118K posts
- 16. Saints 21.6K posts
- 17. Puka 12K posts
- 18. Dolphins 9,501 posts
- 19. Trey Lance N/A
- 20. Raheem Morris 1,035 posts
你可能会喜欢
-
 Robot Operating System (ROS)
Robot Operating System (ROS)
@rosorg -
 The Robot Report
The Robot Report
@therobotreport -
 IEEE RAS
IEEE RAS
@ieeeras -
 Clearpath Robotics by Rockwell Automation
Clearpath Robotics by Rockwell Automation
@clearpathrobots -
 PickNik
PickNik
@PickNikRobotics -
 IEEE ICRA
IEEE ICRA
@ieee_ras_icra -
 The Construct
The Construct
@_TheConstruct_ -
 WeeklyRobotics
WeeklyRobotics
@WeeklyRobotics -
 CMU Robotics Institute
CMU Robotics Institute
@CMU_Robotics -
 Davide Scaramuzza
Davide Scaramuzza
@davsca1 -
 Gazebo Simulator
Gazebo Simulator
@GazeboSim -
 Robotics: Science and Systems
Robotics: Science and Systems
@RoboticsSciSys -
 Wevolver
Wevolver
@WevolverApp -
 Francisco Martín 🇪🇺
Francisco Martín 🇪🇺
@Fmrico -
 Robotic Systems Lab
Robotic Systems Lab
@leggedrobotics
Something went wrong.
Something went wrong.