
Yu Lei
@_OutofMemory_
EE @SJTU1896 | Previous Intern@CMU_Robotics; @UCSD. Learn to understand ourselves and intelligence.🤖🧠👁️



It was a pleasure to be back at @MIT to present at the #Robotics Seminar! Great to see all the exciting work happening there. Thanks so much @GioeleZardini for hosting me!


A large human behavior model. Introducing In-N-On, our latest findings in scaling egocentric data for humanoids. 1. Pre-training and post-training with human data 2. 1,000+ hours of in-the-wild data and 20+ hours of on-task data with accurate action labels Website:…

Zero teleoperation. Zero real-world data. ➔ Autonomous humanoid loco-manipulation in reality. Introducing VIRAL: Visual Sim-to-Real at Scale. We achieved 54 autonomous cycles (walk, stand, place, pick, turn) using a simple recipe: 1. RL 2. Simulation 3. GPUs Website:…

Is real-world RL becoming a cheat code for robot tasks? If we take a task A, run imitation learning, then fine-tune with real-world RL, the task will almost certainly work. So what am I missing? (We’re not talking about generalization to task B here.)
The π*0.6 training recipe: 1️⃣Train a VLA on demonstration data 2️⃣Roll out the VLA to collect on-policy data (with optional human corrections) 3️⃣Learn a value function 4️⃣Train an advantage-conditioned policy Iterate. For café, 414 autonomous episodes + 429 correction episodes

mm level precision beyond actuator limits, so much torque that you need to manage thermals. Owning the whole stack from HW to AI is the only way 🦾

🕸️ Introducing SPIDER — Scalable Physics-Informed Dexterous Retargeting! A dynamically feasible, cross-embodiment retargeting framework for BOTH humanoids 🤖 and dexterous hands ✋. From human motion → sim → real robots, at scale. 🔗 Website: jc-bao.github.io/spider-project/ 🧵 1/n

How do you give a humanoid the general motion capability? Not just single motions, but all motion? Introducing SONIC, our new work on supersizing motion tracking for natural humanoid control. We argue that motion tracking is the scalable foundation task for humanoids. So we…
Humanoids need a single, generalist control policy for all of their physical tasks, not a new one for every new chore or demo. A policy for walking can't dance. A policy for dancing can't support mowing the lawn. We need to scale up humanoid control for diverse behaviors, just…

That’s the direction I want. NeRF/3DGS-SLAM works along roughly those lines. We predict what we’ll see next, then update our model based on what we predicted vs. what we actually see. Except there, the prior/model is based solely on previous test-time images from the same scene.
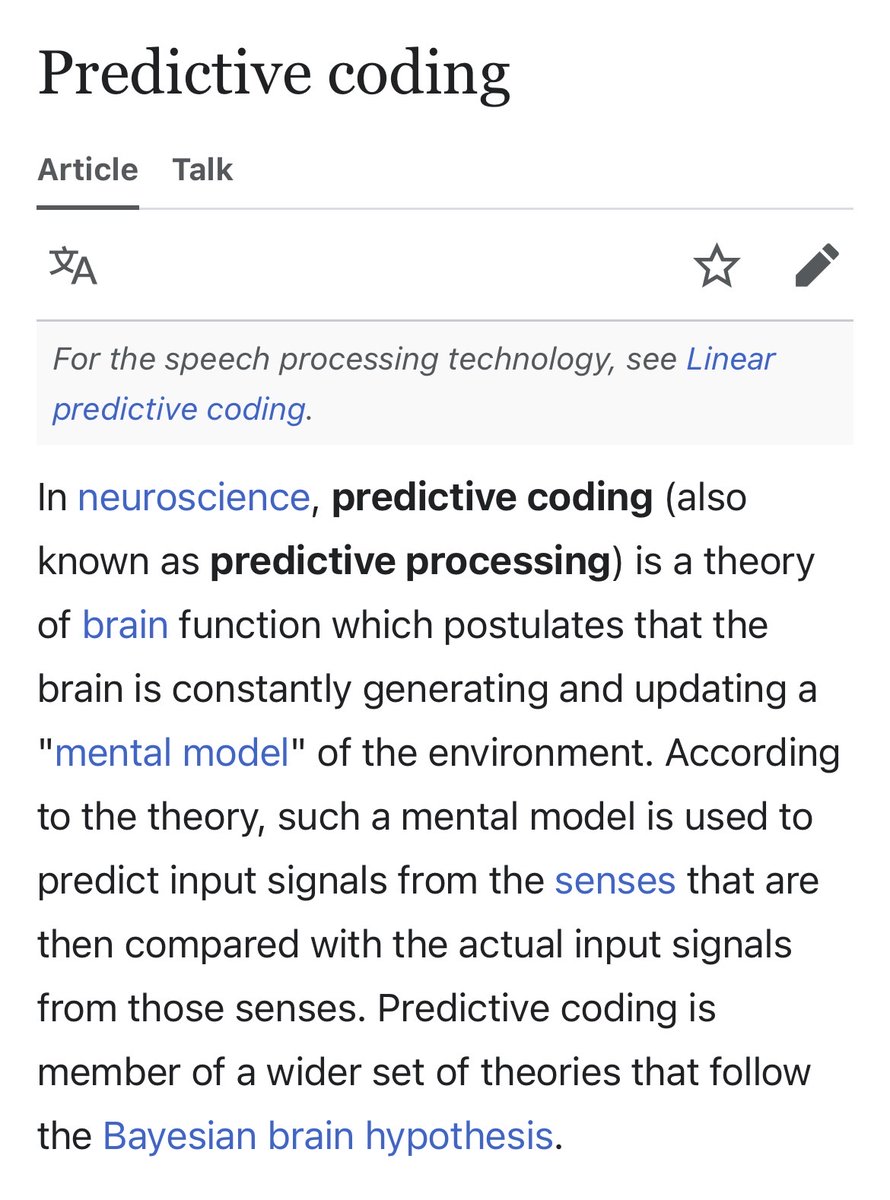

looking ahead, we’re prototyping something new -- we call it predictive sensing. our paper cited tons of work from cogsci and developmental psychology. the more we read, the more amazed we became by human / animal sensing. the human visual system is super high-bandwidth, yet…


Interesting name “Harmonic Reasoning” — Indeed, orchestrating asynchronous, multi-frequency, continuous-time streams of sensing and action is what makes robot learning challenging and unique. It’s great to see more learning architectures designed specifically to address these…

Introducing GEN-0, our latest 10B+ foundation model for robots ⏱️ built on Harmonic Reasoning, new architecture that can think & act seamlessly 📈 strong scaling laws: more pretraining & model size = better 🌍 unprecedented corpus of 270,000+ hrs of dexterous data Read more 👇

Had a blast visiting @CMU_Robotics and gave a talk at the RI Seminar today, where I briefly mentioned our new work, PLD, on self-improving VLAs. It achieved 99.2% on LIBERO and a one-hour continuous execution of GPU assembly with a 100% success rate. Check this out!
What if robots could improve themselves by learning from their own failures in the real-world? Introducing 𝗣𝗟𝗗 (𝗣𝗿𝗼𝗯𝗲, 𝗟𝗲𝗮𝗿𝗻, 𝗗𝗶𝘀𝘁𝗶𝗹𝗹) — a recipe that enables Vision-Language-Action (VLA) models to self-improve for high-precision manipulation tasks. PLD…
What if robots could improve themselves by learning from their own failures in the real-world? Introducing 𝗣𝗟𝗗 (𝗣𝗿𝗼𝗯𝗲, 𝗟𝗲𝗮𝗿𝗻, 𝗗𝗶𝘀𝘁𝗶𝗹𝗹) — a recipe that enables Vision-Language-Action (VLA) models to self-improve for high-precision manipulation tasks. PLD…

Excited to release our new preprint - we introduce Adaptive Patch Transformers (APT), a method to speed up vision transformers by using multiple different patch sizes within the same image!

Sakana AI’s CTO says he’s ‘absolutely sick’ of transformers, the tech that powers every major AI model “You should only do the research that wouldn’t happen if you weren’t doing it.” (@thisismyhat) 🧠 @YesThisIsLion venturebeat.com/ai/sakana-ais-…


Unitree G1 crawl policy deployed to hardware! Plenty of room for improvement, but it's a start.

From demo to duty: RL-100 can serve continuously for ~7 hours—reliable, real-world robot helps.
Introducing RL-100: Performant Robotic Manipulation with Real-World Reinforcement Learning. lei-kun.github.io/RL-100/ 7 real robot tasks, 900/900 successes. Up to 250 consecutive trials in one task, running 2 hours nonstop without failure. High success rate against physical…

Over the past year, my lab has been working on fleshing out theory/applications of the Platonic Representation Hypothesis. Today I want to share two new works on this topic: Eliciting higher alignment: arxiv.org/abs/2510.02425 Unpaired rep learning: arxiv.org/abs/2510.08492 1/9

Excited to share Equilibrium Matching (EqM)! EqM simplifies and outperforms flow matching, enabling strong generative performance of FID 1.96 on ImageNet 256x256. EqM learns a single static EBM landscape for generation, enabling a simple gradient-based generation procedure.























































































United States Trends
- 1. #GMMTV2026 2.68M posts
- 2. MILKLOVE BORN TO SHINE 428K posts
- 3. Good Tuesday 29.8K posts
- 4. #tuesdayvibe 2,209 posts
- 5. WILLIAMEST MAGIC VIBES 58.5K posts
- 6. Mark Kelly 217K posts
- 7. Chelsea 222K posts
- 8. MAGIC VIBES WITH JIMMYSEA 71.8K posts
- 9. JOSSGAWIN MAGIC VIBES 23.9K posts
- 10. TOP CALL 9,500 posts
- 11. Alan Dershowitz 3,318 posts
- 12. AI Alert 8,324 posts
- 13. #JoongDunk 108K posts
- 14. Check Analyze 2,502 posts
- 15. Naps 2,893 posts
- 16. Token Signal 8,688 posts
- 17. #ONEPIECE1167 8,621 posts
- 18. Barca 85.4K posts
- 19. Maddow 15.6K posts
- 20. Hegseth 99.4K posts
Something went wrong.
Something went wrong.