
Albert Wilcox
@albertwilcoxiii
second year PhD student at Georgia Tech @ICatGT working on 3D scene representations and foundation models | MS from @berkeley_ai
قد يعجبك















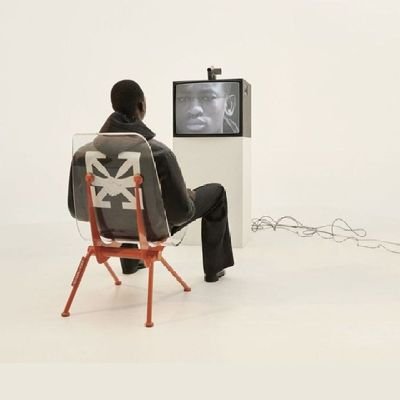
Imitation learning has seen great success, but IL policies still struggle with OOD observations We designed a 3D backbone, Adapt3R, that can combine with your favorite IL algorithm to enable zero-shot generalization to unseen embodiments and camera viewpoints!
My biggest disappointment from #CoRL2025 is that we never got a demo of a humanoid doing the Gangnam style dance
Heading to Seoul to present this work at CoRL 2025! Looking forward to lots of fun discussions this weekend. If you want to chat sometime please send a DM!
Imitation learning has seen great success, but IL policies still struggle with OOD observations We designed a 3D backbone, Adapt3R, that can combine with your favorite IL algorithm to enable zero-shot generalization to unseen embodiments and camera viewpoints!

Robots struggle to learn new skills from human videos. Why? We found that naive co-training produces disjoint distributions. Our EgoBridge (NeurIPS’25) extends Optimal Transport to align human-robot latents, improving success by 44% and generalization to human-only tasks!🧵

Can we scale up mobile manipulation with egocentric human data? Meet EMMA: Egocentric Mobile MAnipulation EMMA learns from human mobile manipulation + static robot data — no mobile teleop needed! EMMA generalizes to new scenes and scales strongly with added human data. 1/9

Introducing Importance Weighted Retrieval, a simple modification to existing retrieval methods! Our importance sampling inspired approach helps us more effectively retrieve from prior datasets for few shot imitation learning! #CoRL2025 Oral w/ Rahul Chand @DorsaSadigh @JoeyHejna

Most imitation learning policies break when the camera moves or the robot changes. NOT THIS ONE 👇 [📍 Bookmark for later ] A new 3D scene representation encoder, tackles this by enabling zero-shot generalization to unseen embodiments and viewpoints… And it works with any IL…

🤖✨ What if models that take action in the physical world could think through your instructions? Meet MolmoAct, our new fully open Action Reasoning Model (ARM) that does just that. 🧵

July has been a big month for Viser! - Released v1.0.0😊 - We did some writing Some demos👇
Humanoid taking a quadruped for a walk was exactly what I needed to see today

Modern AI is confined to the digital world. At Skild AI, we are building towards AGI for the real world, unconstrained by robot type or task — a single, omni-bodied brain. Today, we are sharing our journey, starting with early milestones, with more to come in the weeks ahead.…



Imitation learning frameworks are often with 2D inputs. but 2D limits generalization even to camera poses. This has been an ongoing challenge, especially for humanoids since the camera pose is not steady and need not match the training data. @albertwilcoxiii has been working on…

Tired of slow-moving robots? Want to know how learning-driven robots can move closer to industrial speeds in the real world? Introducing SAIL - a system for speeding up the execution of imitation learning policies up to 3.2x on real robots. A short thread: 1/



































































United States الاتجاهات
- 1. Auburn 43.9K posts
- 2. Brewers 61.6K posts
- 3. Georgia 66.8K posts
- 4. Cubs 54.5K posts
- 5. Kirby 23.2K posts
- 6. Arizona 41.3K posts
- 7. Michigan 62.2K posts
- 8. Hugh Freeze 3,131 posts
- 9. #BYUFOOTBALL N/A
- 10. Gilligan 5,542 posts
- 11. Boots 50.1K posts
- 12. #GoDawgs 5,482 posts
- 13. Kyle Tucker 3,107 posts
- 14. Amy Poehler 3,810 posts
- 15. #ThisIsMyCrew 3,190 posts
- 16. Utah 23.4K posts
- 17. Tina Fey 2,856 posts
- 18. #Toonami 1,931 posts
- 19. #MalimCendari3D 3,523 posts
- 20. Jackson Arnold 2,162 posts
قد يعجبك
-
 Priya Sundaresan
Priya Sundaresan
@priyasun_ -
 Nitish Dashora
Nitish Dashora
@DashoraNitish -
 Dhruv Shah
Dhruv Shah
@shahdhruv_ -
 liquidity 🇮🇱
liquidity 🇮🇱
@statarbwtf -
 Ryan Hoque
Ryan Hoque
@ryan_hoque -
 Justin Kerr
Justin Kerr
@justkerrding -
 Jenn Grannen
Jenn Grannen
@jenngrannen -
 Michael Equi
Michael Equi
@michael_equi -
 Ashwin Balakrishna
Ashwin Balakrishna
@ashwinb96 -
 Max Fu
Max Fu
@letian_fu -
 john so
john so
@johnrso_ -
 Alejandro Escontrela
Alejandro Escontrela
@alescontrela -
 Brandon Trabucco
Brandon Trabucco
@brandontrabucco -
 Mandi Zhao
Mandi Zhao
@ZhaoMandi -
 Vivek Myers
Vivek Myers
@vivek_myers
Something went wrong.
Something went wrong.