
Sudhir Pratap Yadav
@sudhirPyadav
I speak what I feel is true -- Open to change mind and discuss on anything. My views keep changing with information and maturity of my mind.
You might like
















100M Gaussians. Streamed on a single RTX 3090. Welcome to @NVIDIAAIDev 's fVDB Reality Capture — bringing 3D Gaussian Splatting, volumetric data, and OpenUSD into one pipeline. 🎥 Full demo → youtu.be/ZnhBGmHyJqM #NVIDIA #GaussianSplatting #3D


😠💢😵💫Tired of endless data collection & fine-tuning every time you try out VLA? Meet RDT2, the first foundation model that zero-shot deploys on any robot arms with unseen scenes, objects & instructions. No collection. No tuning. Just plug and play🚀 Witness a clear sign of…
What if robots could improve themselves by learning from their own failures in the real-world? Introducing 𝗣𝗟𝗗 (𝗣𝗿𝗼𝗯𝗲, 𝗟𝗲𝗮𝗿𝗻, 𝗗𝗶𝘀𝘁𝗶𝗹𝗹) — a recipe that enables Vision-Language-Action (VLA) models to self-improve for high-precision manipulation tasks. PLD…
Hot take: DAgger (Ross 2011) should be the first paper you read to get into RL, instead of Sutton's book. Maybe also read scheduled sampling (Bengio 2015). And before RL, study supervised learning thoroughly.



Basic Sim2Real pipeline for Single leg🫡, trained using @kevin_zakka's MJ Playground. Basic reward just to track height in sim, no sensors in real life (ik, too basic). Would develop this further but for now shifting to DeepRobotics Lite3. If successful, would send PR to MJP.

friendly reminder that I have a repo full of tutorials for vision language models, computer vision and even Omni models from fine-tuning to distillation
Simulation drives robotics progress, but how do we close the reality gap? Introducing GaussGym: an open-source framework for learning locomotion from pixels with ultra-fast parallelized photorealistic rendering across >4,000 iPhone, GrandTour, ARKit, and Veo scenes! Thread 🧵

🚀 Introducing SoftMimic: Compliant humanoids for an interactive future — bringing humanoids into the real world 🤝 🔗gmargo11.github.io/softmimic/ Current humanoids collapse when they touch the world — they can’t handle contact or deviation from their reference motion 😭 😎SoftMimic…
Excited to introduce DiffuseNNX, a comprehensive JAX/Flax NNX-based library for diffusion and flow matching! It supports multiple diffusion / flow-matching frameworks, Autoencoders, DiT variants, and sampling algorithms. Repo: github.com/willisma/diffu… Delve into details below!…


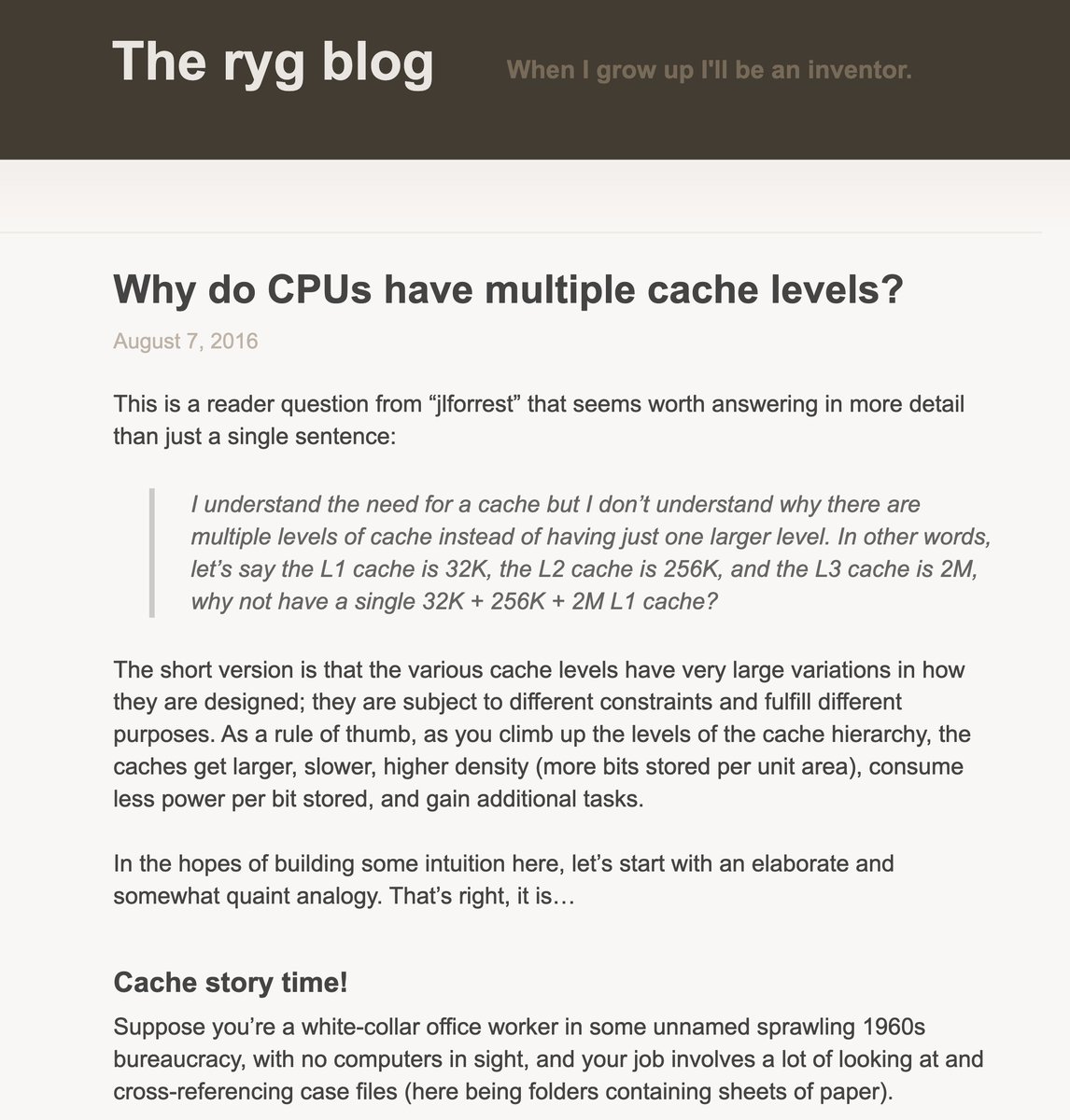
It’s a bit easier to just explain how we got here. In the old days, memory and CPU ran at the same speed. The laws of physics make it incredibly hard to ramp up the MHz of the CPU while keeping physically separated memory chips in sync. The distance is just too far for the…

The question: "Why do CPUs have multiple cache levels?" often gets many CS students and professionals thinking and researching. This article from Fabian Giesen narrates a "cache story" in a relatable way, only to delve into the details - a must-read! fgiesen.wordpress.com/2016/08/07/why…

I really recommend watching this video on how to build high-performance motor controller. VERY interesting stuff!


Have a look at kickstarter.com/projects/pcat2… this also does all the stuff u prolly need


New Robotics Research from NVIDIA & Collaborators Exploring five innovative approaches in robot learning, manipulation, and simulation. @NVIDIARobotics

< Choosing a Vision Backbone > your model’s backbone is its perspective pick ResNet, and it sees in edges pick a ViT, and it sees in patches the backbone decides how your model thinks here are some of the most practical backbones and when you should choose them, from the…



Hoper's PCB has two distinct zones which are galvanically isolated using a wall of isolated DCDC converter, isolated transceivers and isolated drivers. There is no way for direct current to cross between zones. Power Zone: handles 60V battery input, motors power delivery, power…


Huge thanks to my amazing co-authors: @justinyu_ucb (uynitsuj.github.io/about/) @MacSchwager @pabbeel @YideShentu @philippswu 📖Read the full paper: arxiv.org/abs/2509.25358 📷 Project website: qianzhong-chen.github.io/sarm.github.io/ #robotics #AI #imitationlearning #SARM 5/n

A reminder that @corl_conf talks are fully and freely available to watch on @YouTube Keynotes are a must watch! Conference on Robot Learning youtube.com/@conferenceonr… #CoRL2025

Below is mostly a summary of one of my favorite offline RL (ORL) reads: an amazing review by @nanjiang_cs and @tengyangx that clearly conveys what's hard and the key ideas used in that setting. nanjiang.cs.illinois.edu/files/STS_Spec… (screenshots are all from the pdf)

Our first #sim2real on single leg (of quadruped), policy trained in mujoco playground. We are currently 3 people working on rl + robotics. I will now start regularly posting updates of our various projects @vishcomestrue @aditya_kumar_bv


















































































United States Trends
- 1. Packers 98.7K posts
- 2. Eagles 127K posts
- 3. Jordan Love 15.3K posts
- 4. Benítez 12.7K posts
- 5. #WWERaw 133K posts
- 6. LaFleur 14.6K posts
- 7. AJ Brown 7,056 posts
- 8. Kevin Patullo 6,988 posts
- 9. Jalen 24K posts
- 10. Sirianni 5,057 posts
- 11. Jaelan Phillips 8,005 posts
- 12. McManus 4,414 posts
- 13. Grayson Allen 4,022 posts
- 14. #GoPackGo 7,955 posts
- 15. Veterans Day 30.6K posts
- 16. Smitty 5,577 posts
- 17. James Harden 1,905 posts
- 18. Berkeley 59.2K posts
- 19. Cavs 12K posts
- 20. Vit Krejci 1,050 posts
You might like
-
 john
john
@GBusy247 -
 Nishanth Shetty
Nishanth Shetty
@nishetty_ -
 Aman Singh
Aman Singh
@singhaman1750 -
 Kate Domchenko🇺🇦
Kate Domchenko🇺🇦
@lilu88dallas -
 Paul Ships ⚡
Paul Ships ⚡
@paulshipfast -
 kian
kian
@kian0x -
 Robin Tomar
Robin Tomar
@robintomar_ -
 Gaurav Parida
Gaurav Parida
@gauravp___ -
 Aneesh
Aneesh
@neurml -
 billy
billy
@aprolixian -
 ry
ry
@ryancruzb -
 Sxur Tooth
Sxur Tooth
@SxurTooth -
 Isaac Ng
Isaac Ng
@wafflec4t -
 Julian Fried
Julian Fried
@JulianFried -
 Tino
Tino
@TinoAdao
Something went wrong.
Something went wrong.