
おすすめツイート















This week's #PaperILike is "Elephants Don't Pack Groceries: Robot Task Planning for Low Entropy Belief States" (Adu-Bredu, RAL 2022). Love the focus on planning with "low entropy beliefs" -- not full-fledged POMDPs, but also not full observability. PDF: arxiv.org/abs/2011.09105
This week's #PaperILike is "Sloppy Programming" (Little et al., 2010). Vibe coding before it was cool. PDF: dspace.mit.edu/bitstream/hand…

Very thankful for Princeton’s willingness to invest in compute thanks to hard work from many CS faculty. There’s still time to apply to Princeton for your PhD! We’ve got more compute on the way too! That being said, there definitely needs to be more investment in academic…

Last night, @agupta and I hosted a great dinner with 14 professors at #NeurIPS2025 from leading academic labs across the US, and many cited compute in academia as "abhorrent". Out of curiosity I just pulled these stats. This is insane. To do meaningful AI research today you need…

This week's #PaperILike is "Robot Programming" (Tomas Lozano-Perez, 1983). A prescient paper that asks how we might generally program robots like we program computers. Much remains true 42 years later. PDF: homes.cs.washington.edu/~ztatlock/599z…
This week's #PaperILike is "Learning Proofs of Motion Planning Infeasibility" (Li & Dantam, RSS 2021). I like using learning to "fail fast", with guarantees. Important for TAMP, where there are other MP problems to try next. PDF: roboticsproceedings.org/rss17/p064.pdf
This week's #PaperILike is "Interleaving Monte Carlo Tree Search and Self-Supervised Learning for Object Retrieval in Clutter" (Huang et al., ICRA 2022). Impressive results on a difficult and subtle problem, with a nice combo of planning + learning. PDF: arxiv.org/abs/2202.01426
I had a fun time chatting about new work on symbolic world model learning with @chris_j_paxton and @micoolcho on robopapers recently! Check it out if you’d like to hear about all the fruit we used up getting the robot to operate a juicer :)

Full episode dropping soon! Geeking out with @nishanthkumar23 on From Pixels to Predicates: Learning Symbolic World Models via Pretrained Vision-Language Models pix2pred.csail.mit.edu Co-hosted by @micoolcho @chris_j_paxton
Full episode dropping soon! Geeking out with @nishanthkumar23 on From Pixels to Predicates: Learning Symbolic World Models via Pretrained Vision-Language Models pix2pred.csail.mit.edu Co-hosted by @micoolcho @chris_j_paxton
This week's #PaperILike is "Goal-Oriented End-User Programming of Robots" (Porfirio et al., HRI 2024). I like this use of planning to fill in the gaps between subgoals that are directly programmed by end users. PDF: arxiv.org/abs/2403.13988
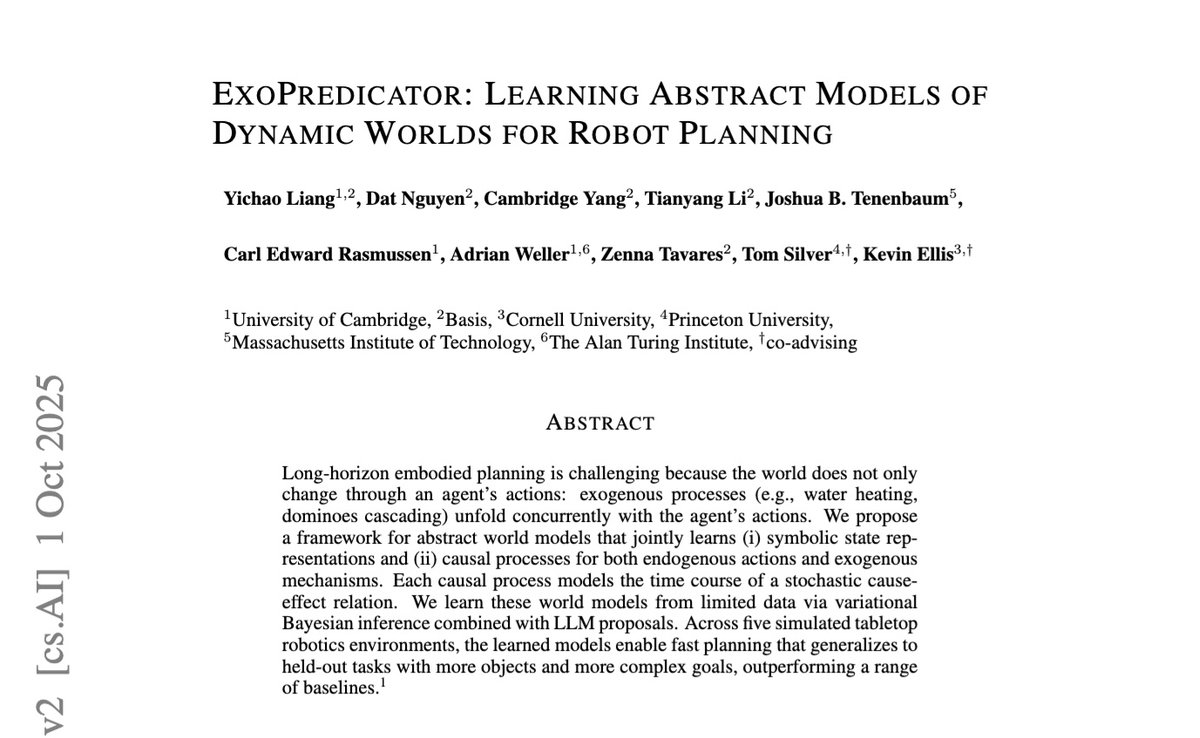
New preprint on learning abstract world models for robotics planning. Paper + code below. 🤖🌐 Must an agent plan by simulating pixels frame by frame, or can it think in abstractions? Consider planning an international flight: we can reason about buying tickets, changing…
This week's #PaperILike is "Lifelong Robot Library Learning: Bootstrapping Composable and Generalizable Skills for Embodied Control with Language Models" (Tziafas & Kasaei, ICRA 2024). DreamCoder-like robot skill learning. Refactoring helps! PDF: arxiv.org/abs/2406.18746

Nothing beats Princeton campus views in the fall. 🍂




🤖Excited to share SLAP, @YijieIsabelLiu's new algorithm using RL to provide better skills for planning! Check out the website for code, videos, and pre-trained models: github.com/isabelliu0/SLAP


Robots can plan, but rarely improvise. How do we move beyond pick-and-place to multi-object, improvisational manipulation without giving up completeness guarantees? We introduce Shortcut Learning for Abstract Planning (SLAP), a new method that uses reinforcement learning (RL) to…

Excited to share this collaborative work led by the exceptional @YijieIsabelLiu. This work has dramatically motivated my recent belief in RL+Planning for intelligent decision making!! Key idea: Use RL to learn improvisational low-level “shortcuts” in planning.
Robots can plan, but rarely improvise. How do we move beyond pick-and-place to multi-object, improvisational manipulation without giving up completeness guarantees? We introduce Shortcut Learning for Abstract Planning (SLAP), a new method that uses reinforcement learning (RL) to…
This week's #PaperILike is "Monte Carlo Tree Search with Spectral Expansion for Planning with Dynamical Systems" (Riviere et al., Science Robotics 2024). A creative synthesis of control theory and search. I like using the Gramian to branch. PDF: arxiv.org/abs/2412.11270

This week's #PaperILike is "Reality Promises: Virtual-Physical Decoupling Illusions in Mixed Reality via Invisible Mobile Robots" (Kari & Abtahi, UIST 2025). This is some Tony Stark level stuff! XR + robots = future. Website: mkari.de/reality-promis… PDF: mkari.de/reality-promis…












































































































United States トレンド
- 1. Cooper Flagg 9,702 posts
- 2. The Spurs 17.3K posts
- 3. Chet 8,385 posts
- 4. Randle 2,505 posts
- 5. Mavs 5,837 posts
- 6. #PorVida 1,459 posts
- 7. #Pluribus 14.2K posts
- 8. UNLV 2,057 posts
- 9. #WWENXT 11K posts
- 10. #GoSpursGo N/A
- 11. Christmas Eve 174K posts
- 12. Rosetta Stone N/A
- 13. Keldon Johnson 1,098 posts
- 14. #GoAvsGo N/A
- 15. Nuggets 12.3K posts
- 16. Skol 1,462 posts
- 17. Cam Johnson N/A
- 18. Yellow 59.4K posts
- 19. Bruins 5,376 posts
- 20. Peyton Watson N/A
おすすめツイート
-
 Shimon Whiteson
Shimon Whiteson
@shimon8282 -
 Peter Battaglia
Peter Battaglia
@PeterWBattaglia -
 Stefano Ermon
Stefano Ermon
@StefanoErmon -
 Brandon Amos
Brandon Amos
@brandondamos -
 Deepak Pathak
Deepak Pathak
@pathak2206 -
 Marc G. Bellemare
Marc G. Bellemare
@marcgbellemare -
 Anca Dragan
Anca Dragan
@ancadianadragan -
 Sergey Levine
Sergey Levine
@svlevine -
 Learning and Intelligent Systems (LIS) @ MIT
Learning and Intelligent Systems (LIS) @ MIT
@MIT_LISLab -
 Jakob Foerster
Jakob Foerster
@j_foerst -
 Joseph Suarez 🐡
Joseph Suarez 🐡
@jsuarez5341 -
 raia hadsell
raia hadsell
@RaiaHadsell -
 Danfei Xu
Danfei Xu
@danfei_xu -
 Dorsa Sadigh
Dorsa Sadigh
@DorsaSadigh -
 Dustin Tran
Dustin Tran
@dustinvtran
Something went wrong.
Something went wrong.