
내가 좋아할 만한 콘텐츠



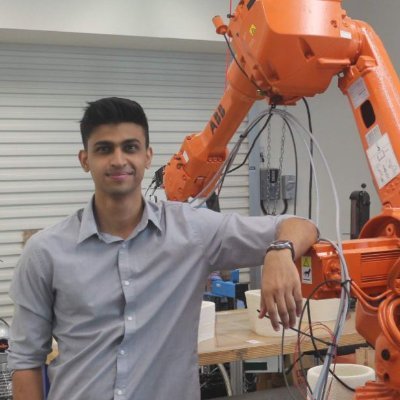
Go @OlympusMonsTeam! Go @PALRobotics!💪🏽💪🏽 2 years of hardwork turned to a dream come true!! Very proud to be part of the team!

Congratulations to the winners of the @NASAPrize Space Robotics Challenge Phase 2, presented by BHP! These teams have been working since 2019 to help develop code for NASA’s next generation of space robots. Visit the link to learn more! bit.ly/2H4xbyO

I'm looking forward to giving it a shot...🙌🏽🙌🏽

I'm super excited to announce mjlab today! mjlab = Isaac Lab's APIs + best-in-class MuJoCo physics + massively parallel GPU acceleration Built directly on MuJoCo Warp with the abstractions you love.
I'm attending #CoRL2025 with some colleagues from @PALRobotics. Visit us tomorrow in the exhibition area 🤖🤖


Pinocchio 3.8.0 was just released! I'm excited about this release because my feature (Viser visualizer) is included, plus there are a lot of fixes (especially to mimic joints) that came from issues I ran into myself. Open source is great. github.com/stack-of-tasks…
github.com
Release pinocchio 3.8.0 · stack-of-tasks/pinocchio
What's Changed Added Continuous joints can now be parsed as mimic from a urdf file (#2756) Beta version of Viser visualizer (#2718) Add pinocchio::graph::ModelGraph class Simple API to build ...

Package building with Pixi is being rolled out! Dive into our latest blog post on crafting C++ packages. And guess what? It’s not just for C++; Pixi plays nice with Python, Rust, ROS, Mojo, and beyond! prefix.dev/blog/pixi-buil…

MuJoCo Playground is now powered by MuJoCo Warp, thanks to some heroic work by @the_real_btaba handling all the gnarly details of the MJX → MJWarp migration. Absolute legend 👏

We're excited to share that MuJoCo Warp is available at HEAD in MJX and for all environments in MuJoCo Playground. See the post here github.com/google-deepmin…


✈️When you arrive at @ChangiAirport for ROSCon 2025 in Singapore you'll be greeted by multiple fleets of robots performing a variety of tasks essential to the function of a busy airport. All of these robots are orchestrated with our Open-RMF project! changiairport.com/en/corporate/o…

this is possibly the best whole body teleoperation that I've ever seen. The motion is really smooth and dynamic. The autonomous results are equally impressive. bostondynamics.com/blog/large-beh…
This is incredible work. Simple, open-source Cartesian controller implementations, a ros2_control interface to MuJoCo, a Gym interface, etc. utiasdsl.github.io/crisp_controll…

Strong men create C++ C++ creates good times Good times create weak men Weak men create Python Python creates hard times Hard times create strong men

"the Bitter Lesson". I actually experience that. I started my career doing research in the field of biped locomotion. Seeing carefully crafted MPC and ZMQ methods being crashed by Reinforcement Learning, certainly feels a little disappointing. dbreunig.com/2025/08/01/doe…

🎉 ¡Lanzamos la Open Call de #ROSCon2025! Es tu oportunidad para dar a conocer tu trabajo ante la comunidad de desarrollo ROS, ¡participa en el evento! 📅 4 y 5 de noviembre 📍Barcelona 🔗 Más info en: roscon.org.es/ROSConES2025.h… ✨ Quieres ser patrocinador? #ROSCon2025


Learn how to GPU-accelerate your code in modern CUDA C++ without writing everything from scratch! During #ISC2025, I'll be giving a talk at the Hamburg C++ User Group on 2025-06-11. It's open to the public. meetup.com/cppusergroupha…




It is #ROS 2 Kilted Kaiju release week and we have five ROS meetups coming up on four different continents! TODAY, May 21st at 5pm, at ICRA in Atlanta join us for our Kilted Kaiju release party sponsored by @IntrinsicAI , @PALRobotics, and @foxglove . 🔗 lu.ma/e0lu3uhh


ROSGPT: ChatGPT Interface for ROS2 for Human-Robot Interaction ROSGPT is a pioneering approach that combines the power of ChatGPT and ROS (Robot Operating System) to redefine human-robot interaction. github.com/aniskoubaa/ros…

Pixels to motor commands is still very 🤯 Hoping frameworks like @LeRobotHF can embrace more ROS for abstracting away sensors and robots - it's the best part of ROS! The policy running in the video was trained with images captured via ROS. github.com/huggingface/le…

ManyMove project - ROS2 humble The manymove project is meant for roboticists to ease the transition to ROS2 coming from the classic frameworks of major manufacturers. github.com/pastoriomarco/…

This video was filmed outside of work hours.
The potential of RL is very clear.... @BostonDynamics #NewAtlas is incredible 🤩 youtu.be/I44_zbEwz_w?si…

youtube.com
YouTube
Walk, Run, Crawl, RL Fun | Boston Dynamics | Atlas
I'm really glad to see ros-controls being recognised. ros-control is a very crucial low level architecture that can make your robot do things in a matter of weeks.
📢 ros-controls is joining the Open Source Robotics Alliance (OSRA)! The OSRA is excited to welcome our first community open-source project to the organization. ros-controls users and developers will benefit from the organizational structure provided by the OSRA ⬇️⬇️⬇️
















































































United States 트렌드
- 1. Happy Halloween 299K posts
- 2. #RUNSEOKJIN_epTOUR_ENCORE 163K posts
- 3. THE TRUTH UNTOLD 3,942 posts
- 4. YouTube TV 54.7K posts
- 5. #Jin_TOUR_ENCORE 149K posts
- 6. #FridayVibes 2,605 posts
- 7. Reformation Day N/A
- 8. Mary Ann 1,030 posts
- 9. #T1WIN 10.1K posts
- 10. Hulu 17.8K posts
- 11. #SinisterMinds 7,939 posts
- 12. Trick or Treat 280K posts
- 13. YTTV N/A
- 14. Ryan Rollins 13.2K posts
- 15. Mindy 3,851 posts
- 16. Mork 1,955 posts
- 17. Fubo 1,362 posts
- 18. Mike McDaniel 5,516 posts
- 19. Samhain 5,241 posts
- 20. Nuclear Option 13.4K posts



Something went wrong.
Something went wrong.