#mitsparklab search results

This recent work shows how to build 3D scene graphs of arbitrary (including outdoor) environments without much training data: arxiv.org/pdf/2312.11713…. Recipe: use LLMs to build an ontology of concepts, and Logic Tensor Networks to ground them into the real world. #mitsparklab
I'm excited to speak at the United Nations AI for Good Global Summit on the topic of “Computer vision for the next generation of autonomous robots” next Tuesday (October 10) at 4pm CEST. Join us if you can: aiforgood.itu.int/event/computer… @AIforGood #mitSparkLab #robotPerception


Hyungtae Lim at #mitSparkLab gave a talk on outlier-robust, long-term robotic lidar mapping leveraging ground segmentation!
#Khronos won the Outstanding Systems Paper Award at #RSS2024 !! very proud of Lukas, Marcus, and Yun! Khronos' code and paper are online: Video: youtu.be/YsH6YIL5_kc?si… Code: github.com/MIT-SPARK/Khro… Paper: arxiv.org/abs/2402.13817 #mitSparkLab #4DSceneUnderstanding


(4/4) In realtime experiments with a quadruped robot, 71% success rate was achieved in correctly identifying the target object of natural language task. #mitSparkLab
I just got tenure from #MIT! I feel fortunate & proud of the work done with many talented and awesome students, postdocs, and collaborators at the #MITSparkLab. I'm also grateful to my wife, family, friends, & mentors for their support. now I look forward to building what's next!
yours truly featured on the MIT homepage: news.mit.edu (permanent link: news.mit.edu/2025/expanding…) . I'm very thankful to have the support of my research team, mentors, friends, and family. The best's yet to come at #mitSparkLab

In the meanwhile, I will keep advancing robot perception with my amazing group at MIT! Lots of exciting things cooking :-) [2/2] #InsideAmazon #mitSparkLab
This is the recording of the TEDxMIT talk I gave last December at MIT - take a look if you want to get a bird's-eye view of our research: youtu.be/zETIKCzatYo?fe… #mitSparkLab #tedxmit #TEDtalks #MIT #robotPerception #robotics #selfdriving

youtube.com
YouTube
Bridging the gap between human and robot perception | Luca Carlone |...
great work by Dominic Maggio, Yun Chang, Nathan Hughes, Lukas Schmid, and our amazing collaborators, Matthew Trang, Dan Griffith, Carlyn Dougherty, and Eric Cristofalo, at MIT Lincoln Laboratory! Paper: arxiv.org/abs/2404.13696 #mitSparkLab #mit #robotPerception #mapping #AI [n/n]
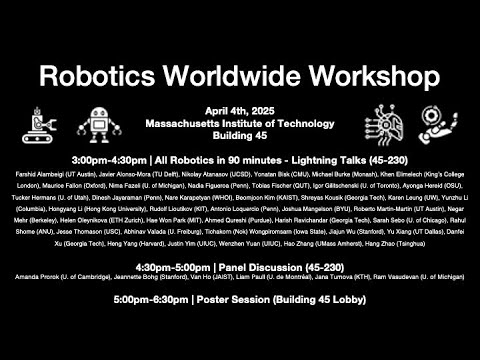
Here is the recording of the Robotics Worldwide Workshop, held at MIT on April 4, 2025: youtube.com/watch?v=0OdOvk… -includes "All Robotics in 90 minutes" lightning talks and a panel discussion on the future of robotics. not for the faint of heart. #mitSparkLab @MITLIDS @MIT_SCC
youtube.com
YouTube
MIT Robotics - Robotics Worldwide Workshop
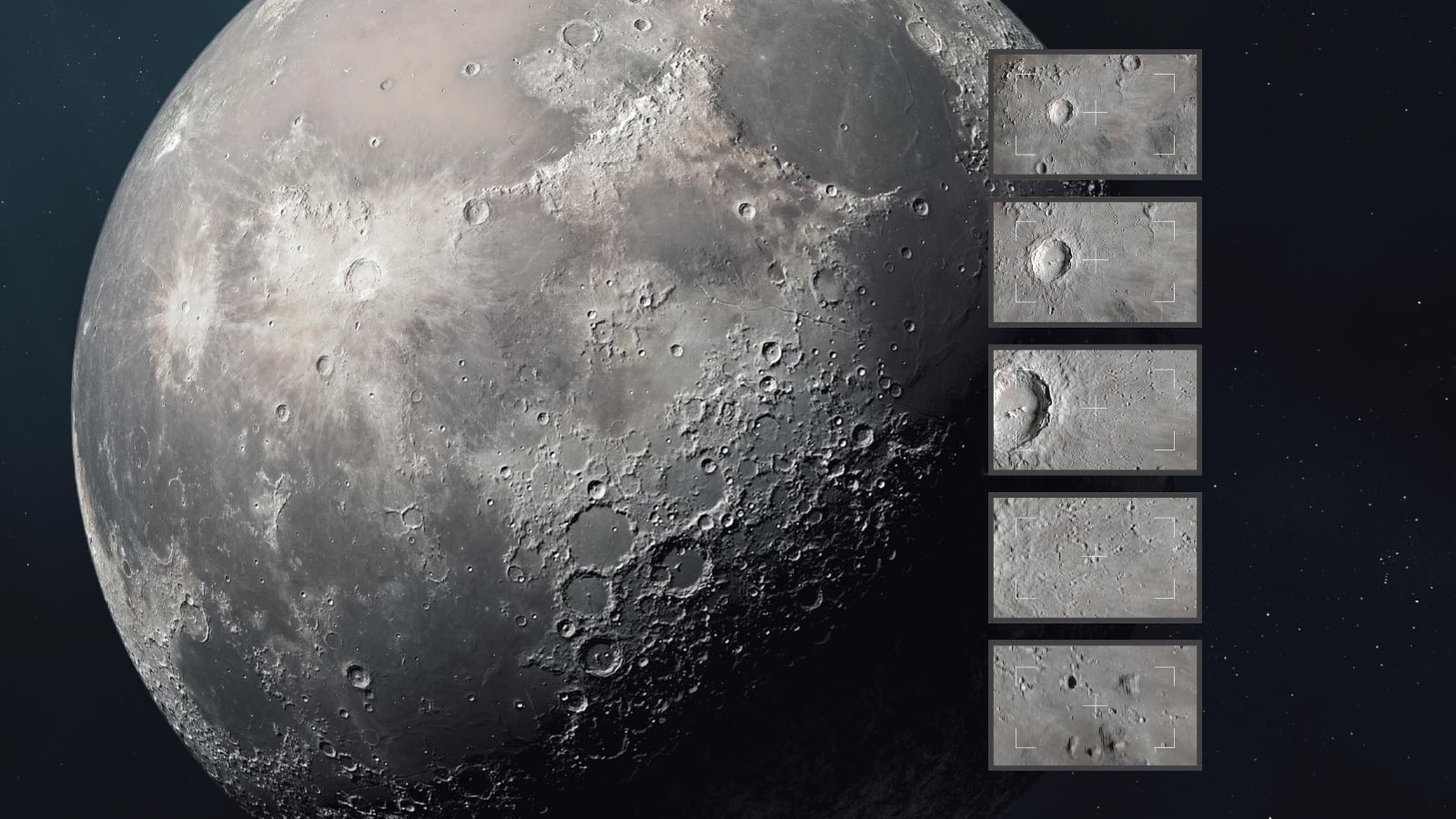
very proud of my student Dominic Maggio, whose work on terrain relative navigation ---tested on Blue Origin's New Shepard rocket--- was featured on Aerospace America! #mitSparkLab #robotPerception #visionbasedNavigation #aerospace Enjoy the article: aerospaceamerica.aiaa.org/departments/st…
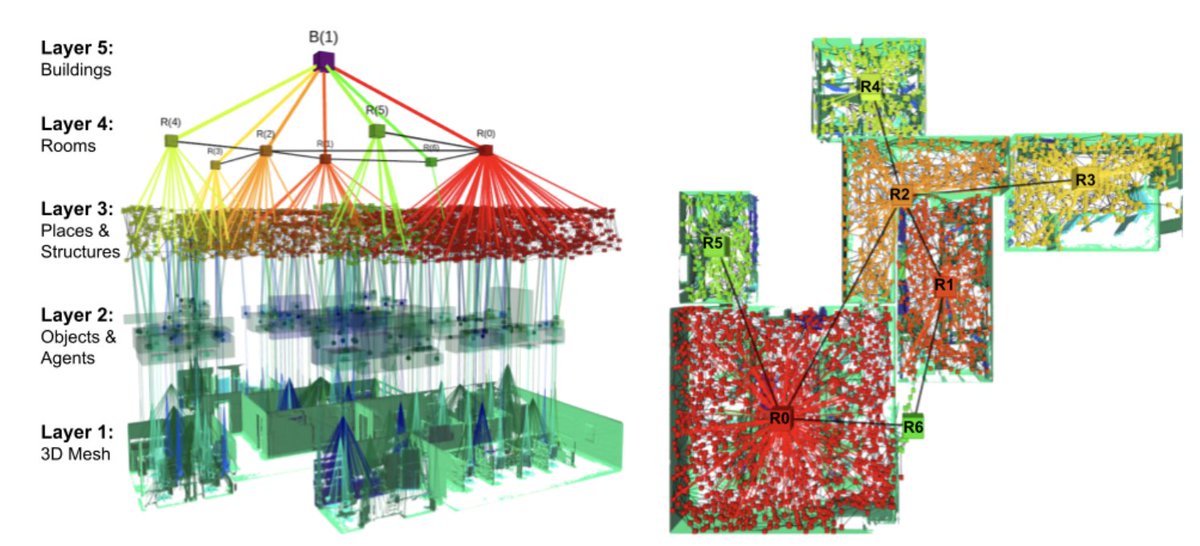
Work led by the amazing Nathan Hughes, and in collaboration with Yun Chang, Siyi Hu, Rumaisa Abdulhai, Rajat Talak, Jared Strader, along with new contributors Lukas Schmid, Aaron Ray, and Marcus Abate. [3/3] #mitSparkLab #spatialPerception #robotPerception #3DSceneGraphs
very excited about this work from the #mitSparkLab on task-driven open-set 3d mapping!!

Helping robots zero in on the objects that matter. LIDS PI @lucacarlone1 and collaborators have developed a new method called Clio that enables robots to quickly map a scene and to make intuitive, task-relevant decisions. Learn more and read their paper: bit.ly/3Bxhnnq

yay!! congrats to the #mitSparkLab team! and thanks @ir0armeni and team for organizing the Nothing Stands Still Challenge!

We are excited to (finally make the post to) announce the winners of the 2024 Nothing Stands Still Challenge, 3rd Workshop on Future of Construction, ICRA24: 🥇 1st Prize (4K CHF) @hyungtaelim*, Jingnan Shi*, Yun Chang *, Lukas Schmid*, Prof. @lucacarlone1 SPARK Lab, MIT (1/3)

very proud of my postdoc Hyungtae Lim for winning the Nothing Stands Still Challenge at #ICRA2024 in collaboration with Jingnan Shi, Yun Chang,& Lukas Schmid!! also great that the team winning 2nd place used github.com/MIT-SPARK/TEAS… @hankyang94 #mitSparkLab @MITAeroAstro @mitidss
Khronos allows you to build a dense semantic 4D model of the scene in real-time. presented at #RSS2024 next week! Feel free to try it out! great work by Lukas Schmid, Marcus Abate, and Yun Chang. #mitSparkLab #spatialPerception #robotPerception #4DSceneUnderstanding [2/2]
I'll give a talk at TEDxMIT this Saturday! Join us for a fun event, including a movie premier, many cool talks, and performances by the MIT [Fire] Spinning Club -- free registration here: tedx.mit.edu #mitsparklab #tedx #tedxtalks #robotics
great work by Nicolas Gorlo and Lukas Schmid! Video: youtu.be/mzumT3T0dYw?fe… Paper: arxiv.org/pdf/2405.00552 Code: github.com/MIT-SPARK/LP2 #mitSparkLab #motionPrediction #LLM #AI #robotics #autonomousSystems
Full paper: rdcu.be/dR0sM great work by Samuel Ubellacker, Aaron Ray, James Bern, Jared Strader #mitSparkLab #aerialGrasping #softRobotics #softDrone #robotics #NatureRobotics #UAVs #drones @MITAeroAstro @MITLIDS [3/3]
In the meanwhile, I will keep advancing robot perception with my amazing group at MIT! Lots of exciting things cooking :-) [2/2] #InsideAmazon #mitSparkLab
Here is the recording of the Robotics Worldwide Workshop, held at MIT on April 4, 2025: youtube.com/watch?v=0OdOvk… -includes "All Robotics in 90 minutes" lightning talks and a panel discussion on the future of robotics. not for the faint of heart. #mitSparkLab @MITLIDS @MIT_SCC
youtube.com
YouTube
MIT Robotics - Robotics Worldwide Workshop
yours truly featured on the MIT homepage: news.mit.edu (permanent link: news.mit.edu/2025/expanding…) . I'm very thankful to have the support of my research team, mentors, friends, and family. The best's yet to come at #mitSparkLab
(4/4) In realtime experiments with a quadruped robot, 71% success rate was achieved in correctly identifying the target object of natural language task. #mitSparkLab
very excited about this work from the #mitSparkLab on task-driven open-set 3d mapping!!
Helping robots zero in on the objects that matter. LIDS PI @lucacarlone1 and collaborators have developed a new method called Clio that enables robots to quickly map a scene and to make intuitive, task-relevant decisions. Learn more and read their paper: bit.ly/3Bxhnnq
yay!! congrats to the #mitSparkLab team! and thanks @ir0armeni and team for organizing the Nothing Stands Still Challenge!
We are excited to (finally make the post to) announce the winners of the 2024 Nothing Stands Still Challenge, 3rd Workshop on Future of Construction, ICRA24: 🥇 1st Prize (4K CHF) @hyungtaelim*, Jingnan Shi*, Yun Chang *, Lukas Schmid*, Prof. @lucacarlone1 SPARK Lab, MIT (1/3)
great work Dominic Maggio, Yun Chang, Nathan Hughes, Lukas Schmid, and our amazing collaborators at MIT Lincoln Laboratory! [4/4] #mitSparkLab #SpatialAI #spatialPerception #robotics #mapping #taskDriven
Full paper: rdcu.be/dR0sM great work by Samuel Ubellacker, Aaron Ray, James Bern, Jared Strader #mitSparkLab #aerialGrasping #softRobotics #softDrone #robotics #NatureRobotics #UAVs #drones @MITAeroAstro @MITLIDS [3/3]
#Khronos won the Outstanding Systems Paper Award at #RSS2024 !! very proud of Lukas, Marcus, and Yun! Khronos' code and paper are online: Video: youtu.be/YsH6YIL5_kc?si… Code: github.com/MIT-SPARK/Khro… Paper: arxiv.org/abs/2402.13817 #mitSparkLab #4DSceneUnderstanding
Hyungtae Lim at #mitSparkLab gave a talk on outlier-robust, long-term robotic lidar mapping leveraging ground segmentation!
Khronos allows you to build a dense semantic 4D model of the scene in real-time. presented at #RSS2024 next week! Feel free to try it out! great work by Lukas Schmid, Marcus Abate, and Yun Chang. #mitSparkLab #spatialPerception #robotPerception #4DSceneUnderstanding [2/2]
Work led by the amazing Nathan Hughes, and in collaboration with Yun Chang, Siyi Hu, Rumaisa Abdulhai, Rajat Talak, Jared Strader, along with new contributors Lukas Schmid, Aaron Ray, and Marcus Abate. [3/3] #mitSparkLab #spatialPerception #robotPerception #3DSceneGraphs
very proud of my postdoc Hyungtae Lim for winning the Nothing Stands Still Challenge at #ICRA2024 in collaboration with Jingnan Shi, Yun Chang,& Lukas Schmid!! also great that the team winning 2nd place used github.com/MIT-SPARK/TEAS… @hankyang94 #mitSparkLab @MITAeroAstro @mitidss
I just got tenure from #MIT! I feel fortunate & proud of the work done with many talented and awesome students, postdocs, and collaborators at the #MITSparkLab. I'm also grateful to my wife, family, friends, & mentors for their support. now I look forward to building what's next!
great work by Nicolas Gorlo and Lukas Schmid! Video: youtu.be/mzumT3T0dYw?fe… Paper: arxiv.org/pdf/2405.00552 Code: github.com/MIT-SPARK/LP2 #mitSparkLab #motionPrediction #LLM #AI #robotics #autonomousSystems
great work by Dominic Maggio, Yun Chang, Nathan Hughes, Lukas Schmid, and our amazing collaborators, Matthew Trang, Dan Griffith, Carlyn Dougherty, and Eric Cristofalo, at MIT Lincoln Laboratory! Paper: arxiv.org/abs/2404.13696 #mitSparkLab #mit #robotPerception #mapping #AI [n/n]
This is the recording of the TEDxMIT talk I gave last December at MIT - take a look if you want to get a bird's-eye view of our research: youtu.be/zETIKCzatYo?fe… #mitSparkLab #tedxmit #TEDtalks #MIT #robotPerception #robotics #selfdriving
youtube.com
YouTube
Bridging the gap between human and robot perception | Luca Carlone |...
This recent work shows how to build 3D scene graphs of arbitrary (including outdoor) environments without much training data: arxiv.org/pdf/2312.11713…. Recipe: use LLMs to build an ontology of concepts, and Logic Tensor Networks to ground them into the real world. #mitsparklab
I'll give a talk at TEDxMIT this Saturday! Join us for a fun event, including a movie premier, many cool talks, and performances by the MIT [Fire] Spinning Club -- free registration here: tedx.mit.edu #mitsparklab #tedx #tedxtalks #robotics
very proud of my student Dominic Maggio, whose work on terrain relative navigation ---tested on Blue Origin's New Shepard rocket--- was featured on Aerospace America! #mitSparkLab #robotPerception #visionbasedNavigation #aerospace Enjoy the article: aerospaceamerica.aiaa.org/departments/st…

HUGE!! we won the DARPA SubT Challenge Urban Circuit!! kudos to our great team CoSTAR led by JPL! #mitSparkLab #JPL #Caltech #MIT #KAIST #DARPA #SubTChallenge

I'm excited to speak at the United Nations AI for Good Global Summit on the topic of “Computer vision for the next generation of autonomous robots” next Tuesday (October 10) at 4pm CEST. Join us if you can: aiforgood.itu.int/event/computer… @AIforGood #mitSparkLab #robotPerception
Our team #CoStar won the 2nd place at the DARPA Subterranean Challenge (Tunnel Circuit)! very proud of our collaboration with JPL, Caltech, and KAIST. #mitSparkLab #JPL #SubTChallenge

#Khronos won the Outstanding Systems Paper Award at #RSS2024 !! very proud of Lukas, Marcus, and Yun! Khronos' code and paper are online: Video: youtu.be/YsH6YIL5_kc?si… Code: github.com/MIT-SPARK/Khro… Paper: arxiv.org/abs/2402.13817 #mitSparkLab #4DSceneUnderstanding
how can you design more effective RL approaches for navigation? use high-level representations produced by modern perception pipelines! You can find our latest paper at arxiv.org/pdf/2108.01176…, which uses 3D scene graphs for RL-based navigation. #mitSparkLab #graphNeuralNetworks
@hankyang94 successfully defended his Ph.D. thesis on "Certifiable Outlier-Robust Geometric Perception"! It has been such a pleasure to work with Hank over the last few years and I look forward to seeing the great things he will do in the future (1/3) #mitSparkLab

Hyungtae Lim at #mitSparkLab gave a talk on outlier-robust, long-term robotic lidar mapping leveraging ground segmentation!
Congrats to Josh Fishman for being a finalist for the Best Poster Award at the IROS Workshop on "Application-Oriented Modelling and Control of Soft Robots". initial paper: arxiv.org/pdf/2004.04238… -stay tuned for more results and a real prototype! #mitsparklab #softrobotics #drone
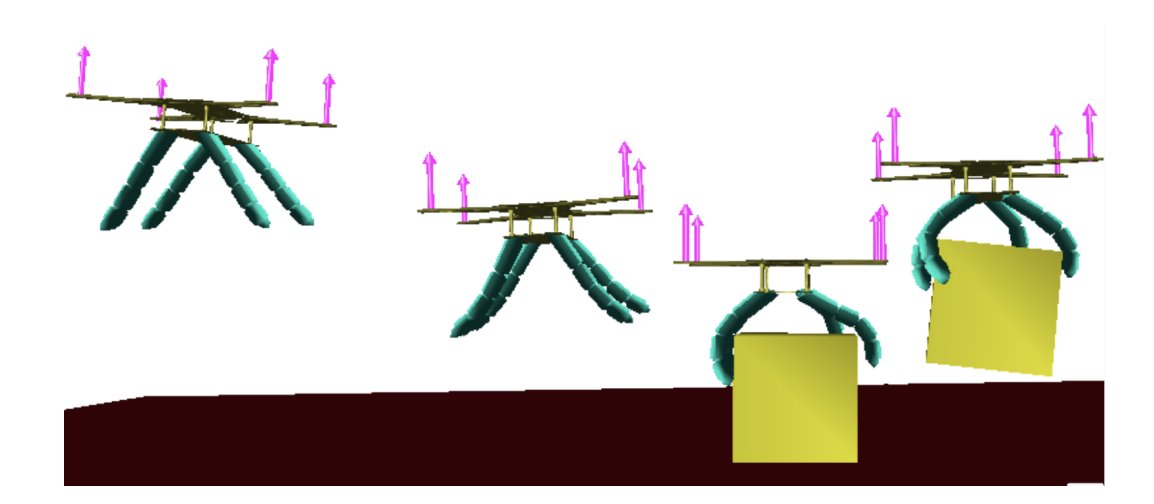
New paper on soft aerial manipulation from SPARK. Now you can hoard toilet paper from the safety of your apartment! (or do the right thing and relax by reading this paper arxiv.org/pdf/2004.04238…). Full video: youtu.be/NNpQxP0SPFk #mitSparkLab #MIT #drones #robots #toiletpaper
It was great to catch up and go for a hike with the cool people in the #mitsparklab after >1year of zoom meetings! with our new temporary mascot, Teddy! @hankyang94 @TalakRajat @jingnanshi


our work on graduated non-convexity for robust geometric perception won the best paper award in Robotic Vision at ICRA! congrats to Heng, Pasquale, Vasileios! video: youtu.be/F0AlzLA0DY8 paper: arxiv.org/abs/1909.08605 (picture courtesy of @pappasg69) #mitSparkLab #ICRA2020
Truly humbled to receive the AIAA Aeronautics and Astronautics Advising Award -- it's a blast to have the opportunity to work with such a cool and talented cohort of undergraduate students at #MIT!! #AIAA #mitSparkLab #advising

Something went wrong.
Something went wrong.
United States Trends
- 1. Giannis 48.6K posts
- 2. Tosin 45.9K posts
- 3. Spotify 1.37M posts
- 4. Leeds 72.8K posts
- 5. Bucks 32.1K posts
- 6. #WhyIChime 1,812 posts
- 7. Wirtz 26K posts
- 8. Maresca 38.9K posts
- 9. DANNY PHANTOM 4,723 posts
- 10. Milwaukee 15.5K posts
- 11. Sunderland 36.7K posts
- 12. Delap 13.2K posts
- 13. Merino 34.1K posts
- 14. #LEECHE 19.2K posts
- 15. Chiesa 6,445 posts
- 16. Joao Pedro 6,293 posts
- 17. Mike Lindell 9,327 posts
- 18. Chris Paul 50.8K posts
- 19. Badiashile 5,675 posts
- 20. Jack Smith 33.3K posts