Julen Urain
@robotgradient
Robotics Tinkerer. RS@FAIR (Embodied AI) Prev: @DFKI, @TUDarmstadt, @NvidiaAI. http://robotgradient.com X http://github.com/robotgradient
Bạn có thể thích















This was very challenging and very cool to see evolve! I personally was no sure if it would work, but @irmakkguzey pushed so hard to show it does. Learning dexterous robot policies with only human video data, using the egocentric view from Aria2 glasses, chill and easy 😁

Dexterous manipulation by directly observing humans - a dream in AI for decades - is hard due to visual and embodiment gaps. With simple yet powerful hardware - Aria 2 glasses 👓 - and our new work AINA 🪞, we are now one significant step closer to achieving this dream.

After a year of team work, we're thrilled to introduce Depth Anything 3 (DA3)! 🚀 Aiming for human-like spatial perception, DA3 extends monocular depth estimation to any-view scenarios, including single images, multi-view images, and video. In pursuit of minimal modeling, DA3…
The expert mode is going to bring a lot of news in the future 🙃


Introducing DINOv3 🦕🦕🦕 A SotA-enabling vision foundation model, trained with pure self-supervised learning (SSL) at scale. High quality dense features, combining unprecedented semantic and geometric scene understanding. Three reasons why this matters…

Anyone interested in tactile sensing for robotics should be following Akash's solid releases. How should we integrate rich tactile sensing modality for policy learning?
Robots need touch for human-like hands to reach the goal of general manipulation. However, approaches today don’t use tactile sensing or use specific architectures per tactile task. Can 1 model improve many tactile tasks? 🌟Introducing Sparsh-skin: tinyurl.com/y935wz5c 1/6

Touch perception holds the key to unlock robot dexterity Our new @SciRobotics work shows how to fuse tactile & vision, track pose+shape of novel objects during dexterous manipulation science.org/doi/10.1126/sc… It's a culmination of our work over the last 4 years, see @Suddhus 🧵⬇
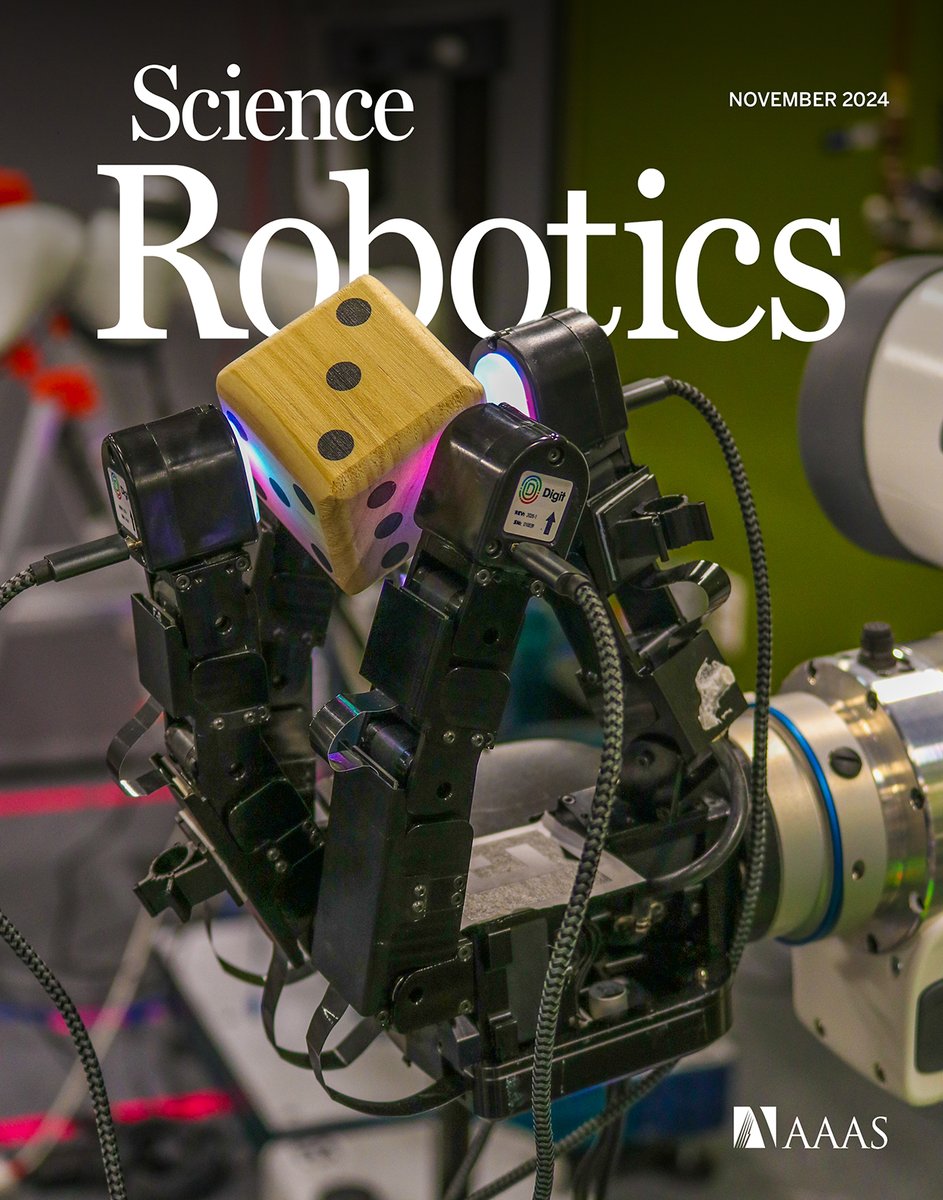
For robot dexterity, a missing piece is general, robust perception. Our new @SciRobotics work combines multimodal sensing with neural representations to perceive novel objects in-hand. 🎲 Featured on the cover of the November issue! #ScienceRoboticsResearch 🧵1/9

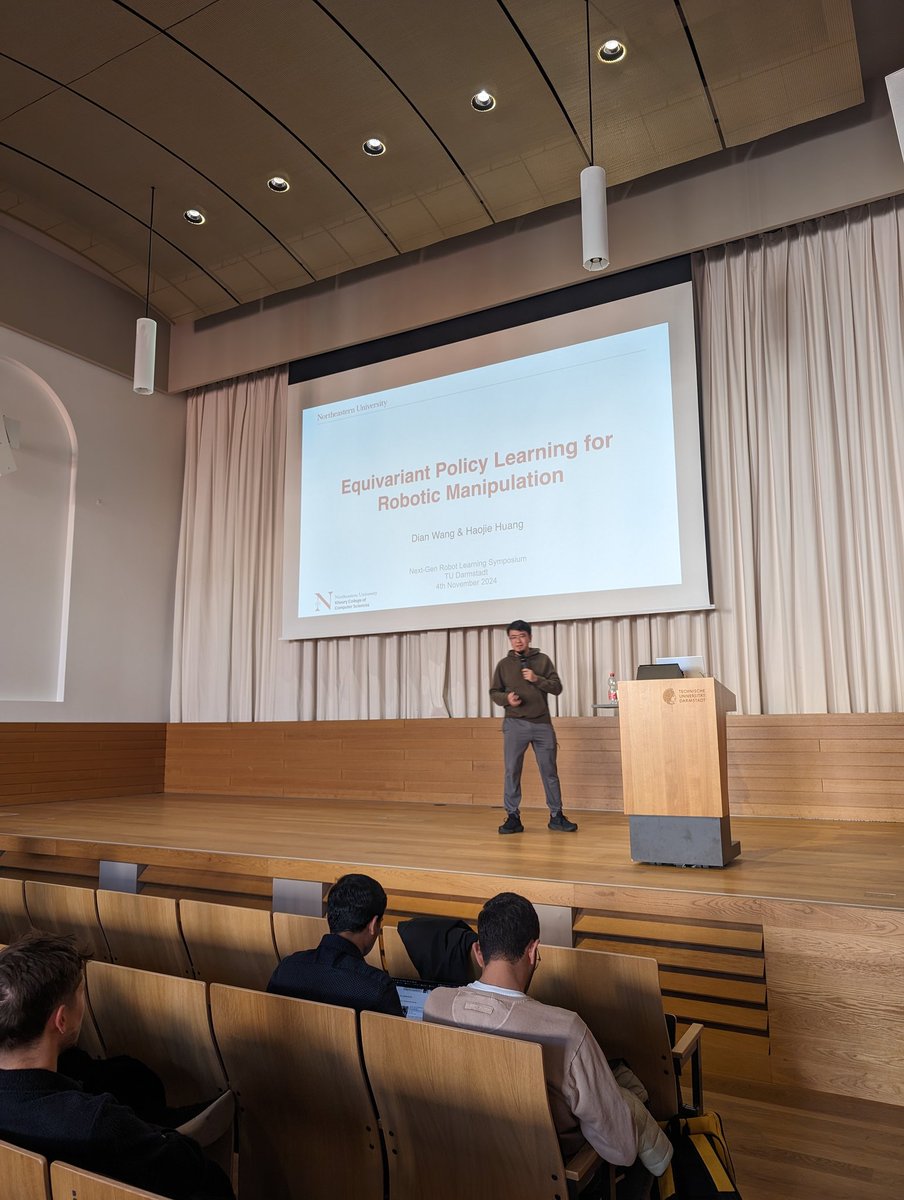
Perfect start to the #CoRL2024 week! Was a pleasure organizing the NextGen Robot Learning Symposium at @TUDarmstadt with @firasalhafez @GeorgiaChal Thanks to the speakers for the great talks! @YunzhuLiYZ @NimaFazeli7 @Dian_Wang_ @HaojieHuang13 @Vikashplus @ehsanik @Oliver_Kroemer



















































































































United States Xu hướng
- 1. #AAA2025 76.3K posts
- 2. Cocona 112K posts
- 3. Gunther 25.1K posts
- 4. YUNHO 21.6K posts
- 5. Tulane 14.2K posts
- 6. #MCWonyoungAAAte 14.5K posts
- 7. 5 YEARS WITH MC WONYOUNG 13.7K posts
- 8. fnaf 2 65.4K posts
- 9. #SmackDown 36.8K posts
- 10. Trouba 1,267 posts
- 11. #GCWSay N/A
- 12. #ROHFinalBattle 19.1K posts
- 13. Boise 6,584 posts
- 14. UNLV 4,457 posts
- 15. Flag Day 3,254 posts
- 16. Meek 8,777 posts
- 17. Dizzy 6,554 posts
- 18. The EU 336K posts
- 19. North Texas 7,528 posts
- 20. LA Knight 11.2K posts
Bạn có thể thích
-
 Chenhao Li @ NeurIPS 2025
Chenhao Li @ NeurIPS 2025
@breadli428 -
 Georgia Chalvatzaki
Georgia Chalvatzaki
@GeorgiaChal -
 Jan Peters
Jan Peters
@Jan_R_Peters -
 Jack Collins
Jack Collins
@Jack_T_Collins -
 Intelligent Autonomous Systems Group
Intelligent Autonomous Systems Group
@ias_tudarmstadt -
 Michael Posa
Michael Posa
@MichaelAPosa -
 Nathan Ratliff
Nathan Ratliff
@robot_trainer -
 Niklas Funk
Niklas Funk
@n_w_funk -
 Tabitha Edith Lee
Tabitha Edith Lee
@TabulaRobot -
 An Thái Lê
An Thái Lê
@an_thai_le -
 Daniel Palenicek
Daniel Palenicek
@DPalenicek -
 Puze LIU
Puze LIU
@liu_puze -
 Davide Tateo
Davide Tateo
@davide_tateo -
 Zoubin Ghahramani
Zoubin Ghahramani
@ZoubinGhahrama1 -
 Firas Al-Hafez
Firas Al-Hafez
@firasalhafez
Something went wrong.
Something went wrong.