Zhongyu Li
@ZhongyuLi4
PhD student doing robotics@UC Berkeley. Randomly post robot & cat things here.
قد يعجبك















Interested in making your bipedal robots to be athletes? We summarized our RL work to create robust & adaptive controllers for general bipedal skills. 400m-dash, running over terrains/against perturbations, targeted jumping, compliant walking, not a problem for bipeds now.🧵👇

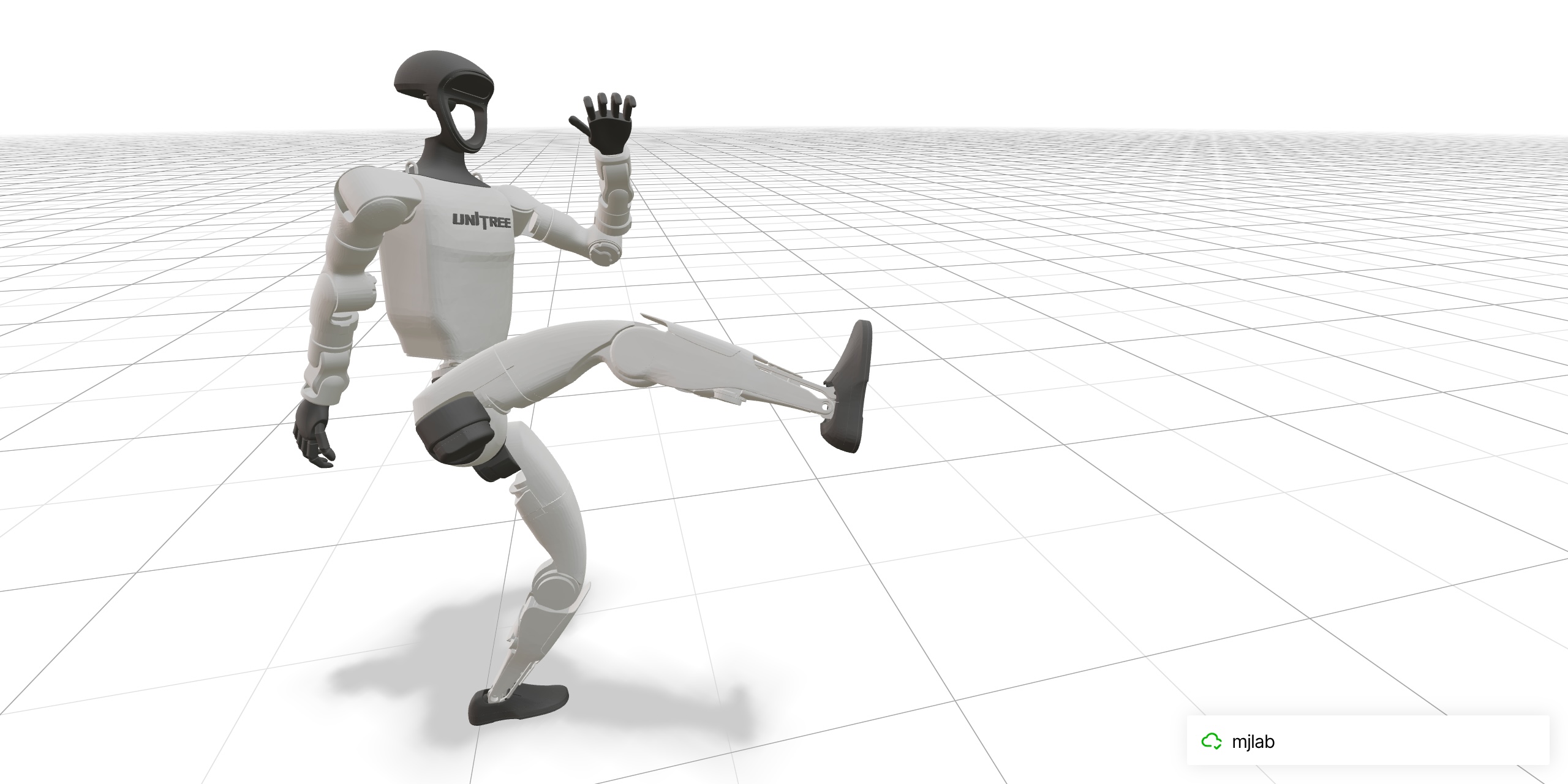
We open-sourced the full pipeline! Data conversion from MimicKit, training recipe, pretrained checkpoint, and deployment instructions. Train your own spin kick with mjlab: github.com/mujocolab/g1_s…

Amazing results! Such motion tracking policies can be trivially trained using our open-source code: github.com/HybridRobotics…


Unitree G1 Kungfu Kid V6.0 A year and a half as a trainee — I'll keep working hard! Hope to earn more of your love🥰
It was a joy bringing Jason’s signature spin-kick to life on the @UnitreeRobotics G1. We trained it in mjlab with the BeyondMimic recipe but had issues on hardware last night (the IMU gyro was saturating). One more sim-tuning pass and we nailed it today. With @qiayuanliao and…

Implementing motion imitation methods involves lots of nuisances. Not many codebases get all the details right. So, we're excited to release MimicKit! github.com/xbpeng/MimicKit A framework with high quality implementations of our methods: DeepMimic, AMP, ASE, ADD, and more to come!

Training RL agents often requires tedious reward engineering. ADD can help! ADD uses a differential discriminator to automatically turn raw errors into effective training rewards for a wide variety of tasks! 🚀 Excited to share our latest work: Physics-Based Motion Imitation…
Implementing motion imitation methods involves lots of nuisances. Not many codebases get all the details right. So, we're excited to release MimicKit! github.com/xbpeng/MimicKit A framework with high quality implementations of our methods: DeepMimic, AMP, ASE, ADD, and more to come!

Humanoid motion tracking performance is greatly determined by retargeting quality! Introducing 𝗢𝗺𝗻𝗶𝗥𝗲𝘁𝗮𝗿𝗴𝗲𝘁🎯, generating high-quality interaction-preserving data from human motions for learning complex humanoid skills with 𝗺𝗶𝗻𝗶𝗺𝗮𝗹 RL: - 5 rewards, - 4 DR…
This is how the generated terrains were laid out for training the motion tracker in PARC with Isaac Gym 😱. It was good enough for the scope of the paper but it could definitely be much more compact with a bit of engineering effort!


@kevin_zakka dropping some high quality software as usual! I've been trying to pick a framework recently for some upcoming projects and this just made my decision a lot harder - so much new activity in this space! Here is a (simplified) overview of the options:

I'm super excited to announce mjlab today! mjlab = Isaac Lab's APIs + best-in-class MuJoCo physics + massively parallel GPU acceleration Built directly on MuJoCo Warp with the abstractions you love.
I'm super excited to announce mjlab today! mjlab = Isaac Lab's APIs + best-in-class MuJoCo physics + massively parallel GPU acceleration Built directly on MuJoCo Warp with the abstractions you love.
Love this feature!!!
Of course mjlab supports the native MuJoCo viewer. Makes it a breeze to pause, slow down, inspect contacts, perturb the robot, etc. There's also a brand new pane for reward visualization :)

We just did World’s first on-stage autonomous demo of long-horizon dexterous VLA 🚨 No training. No setup. Performance out of the box. Live demo is hard and unpredictable, but we felt great about our model’s generalization, and it went pretty well! 💯 Zero-shot. 100% success.
Meet mjlab. Powered by MuJoCo Warp. Drops Monday.





Yesterday marked @UWaterloo's first robot learning reading group for fall 2025, and it was a great success! This week focused on robot foundation models, covering Pi0 by @physical_int and LBM by @ToyotaResearch. Shoutout to @djkesu1 for helping cohost, and @palatialXR for…

Join us TODAY for the return of the GRASP SFI Seminar series for Fall 2025 Semester! Please welcome Tairan He who will be presenting "“Scalable Sim-to-Real Learning for General-Purpose Humanoid Skills” from 3PM-4PM. More info: grasp.upenn.edu/events/fall-20… #GRASP #GRASPLab #GRASPSFI

Amazing to see how fast the open-source humanoid (and Berkeley Humanoid Lite) community is expanding🤩!!!


🤯🤯🤯🤯🤯

This is just the beginning! 🌟 At @DexmateAI , we're not just building robots - we're creating intelligent partners that work alongside humans to solve real-world challenges. Proud to be part of the @NVIDIARobotics ecosystem driving this transformation.

Have you seen moves like that? 👀 @DexmateAI is developing a general-purpose humanoid robot with incredible agility. Leveraging #NVIDIARobotics tech, it’s helping in manufacturing, retail, and logistics. 🤖 Learn more 👉 nvda.ws/3HCDcFx






































































































United States الاتجاهات
- 1. phil 31.1K posts
- 2. Columbus 188K posts
- 3. PHAN 54.5K posts
- 4. President Trump 1.2M posts
- 5. Middle East 295K posts
- 6. Brian Callahan 11.9K posts
- 7. Thanksgiving 58.4K posts
- 8. #IndigenousPeoplesDay 14.8K posts
- 9. Titans 39K posts
- 10. Azzi 9,788 posts
- 11. Cam Talbot N/A
- 12. Macron 232K posts
- 13. Vrabel 7,017 posts
- 14. #UFC323 4,117 posts
- 15. Cape Verde 22.7K posts
- 16. HAZBINTOOZ 7,182 posts
- 17. Marc 53.2K posts
- 18. Cejudo 1,227 posts
- 19. #DonnaAdelson N/A
- 20. Sabres 4,152 posts
قد يعجبك
-
 Chenhao Li
Chenhao Li
@breadli428 -
 Danfei Xu
Danfei Xu
@danfei_xu -
 Andy Zeng
Andy Zeng
@andyzeng_ -
 Yilun Du
Yilun Du
@du_yilun -
 Lerrel Pinto
Lerrel Pinto
@LerrelPinto -
 Christopher Agia
Christopher Agia
@agiachris -
 Model-Based Optimization
Model-Based Optimization
@TCOptRob -
 Vikash Kumar
Vikash Kumar
@Vikashplus -
 Yuxiang Yang
Yuxiang Yang
@yxyang1995 -
 Yifeng Zhu
Yifeng Zhu
@yifengzhu_ut -
 Antonio Loquercio
Antonio Loquercio
@antoniloq -
 Tao Chen
Tao Chen
@taochenshh -
 Bam4d
Bam4d
@Bam4d -
 Glen Berseth
Glen Berseth
@GlenBerseth -
 Xuxin Cheng
Xuxin Cheng
@xuxin_cheng
Something went wrong.
Something went wrong.